<Details subject to verification and changes >
Fall Validation Goal:
- Navigate to the stuck rover (known environmental dynamics {map, information about the terrain, controlled environement} and locations of the two rovers are assumed)
- Rescue it (dock it and pull it out)
Spring Validation Goal:
- Actively detect stuck
- Explore the environment autonomously
- Environmental awareness
Sensing Capability:
- GPS
- Encoder (for motor)
- IMU
Communication Capability:
- WiFi
Actuation Capability:
- Motors (with encoder)
Work Breakdown Structure:
The following information is valid for the Fall Validation experiment, unless mentioned explicitly
- What is user input?
- Surveying location destination – Use input for the broader agenda of the project
- For the Fall Validation Experiment, a pre-processed map with information about the terrain is made available
- Location of the stuck rover both in the absolute and the relative frames of references
- For the FVE – user inputs is not considered.
- Do we have prior information about the docking point? Or does it have to be determined on the go?
- Depends on the docking mechanism, since we are going to use an electromagnetic docking mechanism and for the FVE/ in general the use case – it might be best tow the robot from the ventral or dorsal side. And in order to accommodate the physical dimensions of the mechanism on the robot, the docking point will be located at the rear of the rover and the winch will be located in the front. The docking point provides maximum the shared contact surface area.
- Output
- State of the rover – to determine the docking point and the approach
- Useful photos – irrelevant for the FVE – required for the broader goal of the project
- Actuation of the wheel (torque to the wheels), actuation of the stuck magnet and control of the winch
- SITUATION CONSIDERATION: The rescue rover has sufficient navigable space around the stuck rover (to dock)
- The docking point will be provided for the FVE but for the complete project the docking point is not spatially restricted & will have to determined by the rescue rover (either by surveying or communicating with the stuck rover)
- What is the feature that denotes that 2 robots from a set of robots form a one-to-one pair to determine the relative distance? – At the start of time (t =0) all the emitters/ sweepers/ lighthouses (controlled) will be switched OFF, only when a request is received from an entity (rover/ global controller)- sweeping begins. The requests are sent out one after the other – addressing only one rover at a time. When no request is received/ after attending a request / after a time out – sweeping should stop. Thus, the rover which made the requests can determine its location with respect to all the rovers other rovers (part of same network) in the vicinity.
- How to determine success of dock? i.e, STATE OF DOCK
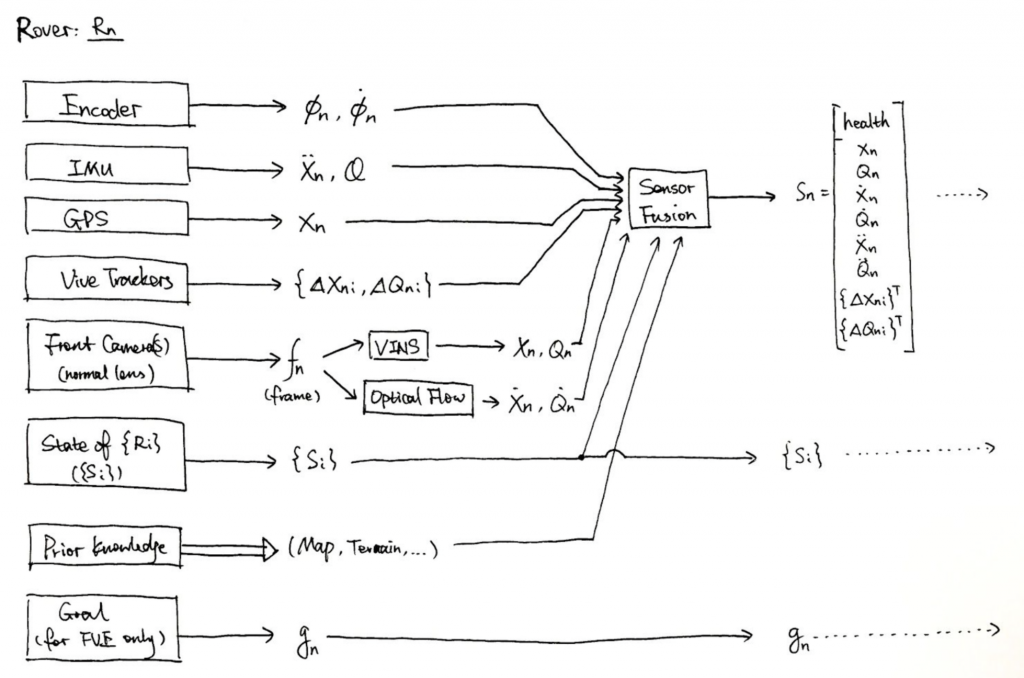
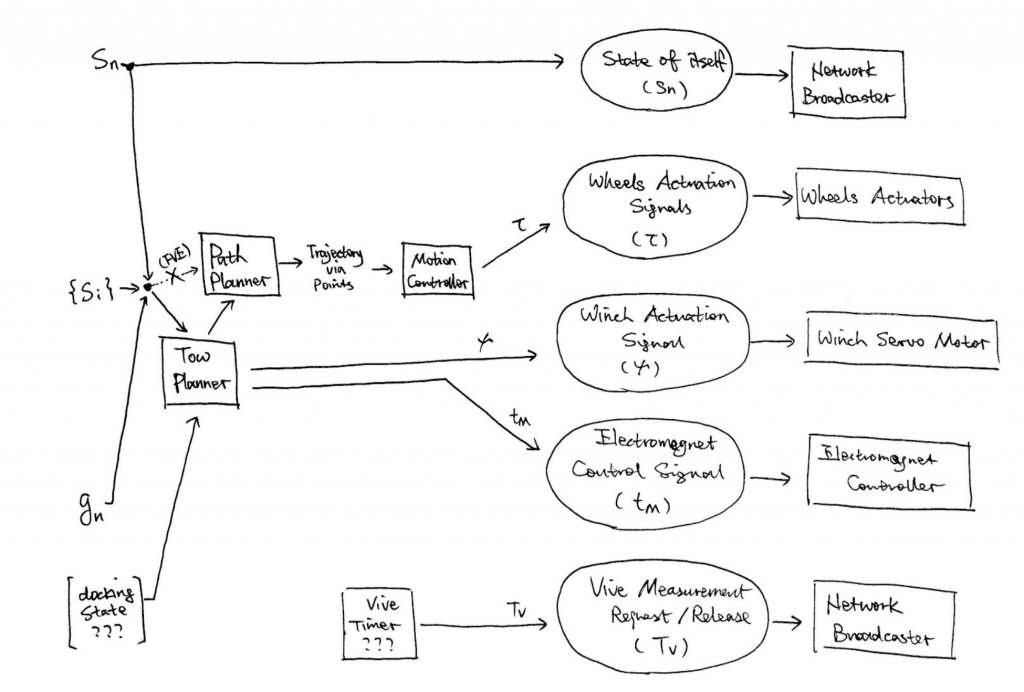
Draft Software Architecture (David & Karthik):