Fall Semester Implementation Details
In the Fall semester we gave a major makeover to our UAV subsystem where we made a moved on from our custom hexacopter platform to the DJI Matrice M210 V2
UAV Implementation Details
 The DJI Matrice M210 V2 has been modified and now contains a Realsense D435i, FLIR 320 thermal camera and a new custom designed extinguishing mechanism which can throw water at a distance of more than 2 m, even in the presense of thrust from the motors. Extinguishing mechanism is built around two bottles mounted on the two legs of the landing gear and a water pump is mounted on the front of the landing gear. To prevent the water from dripping/leaking we designed a cork type mechanism such that it prevents the dripping until the UAV actuates the pump for the first time. Teensy microcontroller, a relay circuitry, and a separate Li-Po battery is used to power the water pump.
The DJI Matrice M210 V2 has been modified and now contains a Realsense D435i, FLIR 320 thermal camera and a new custom designed extinguishing mechanism which can throw water at a distance of more than 2 m, even in the presense of thrust from the motors. Extinguishing mechanism is built around two bottles mounted on the two legs of the landing gear and a water pump is mounted on the front of the landing gear. To prevent the water from dripping/leaking we designed a cork type mechanism such that it prevents the dripping until the UAV actuates the pump for the first time. Teensy microcontroller, a relay circuitry, and a separate Li-Po battery is used to power the water pump.
UGV Implementation Details
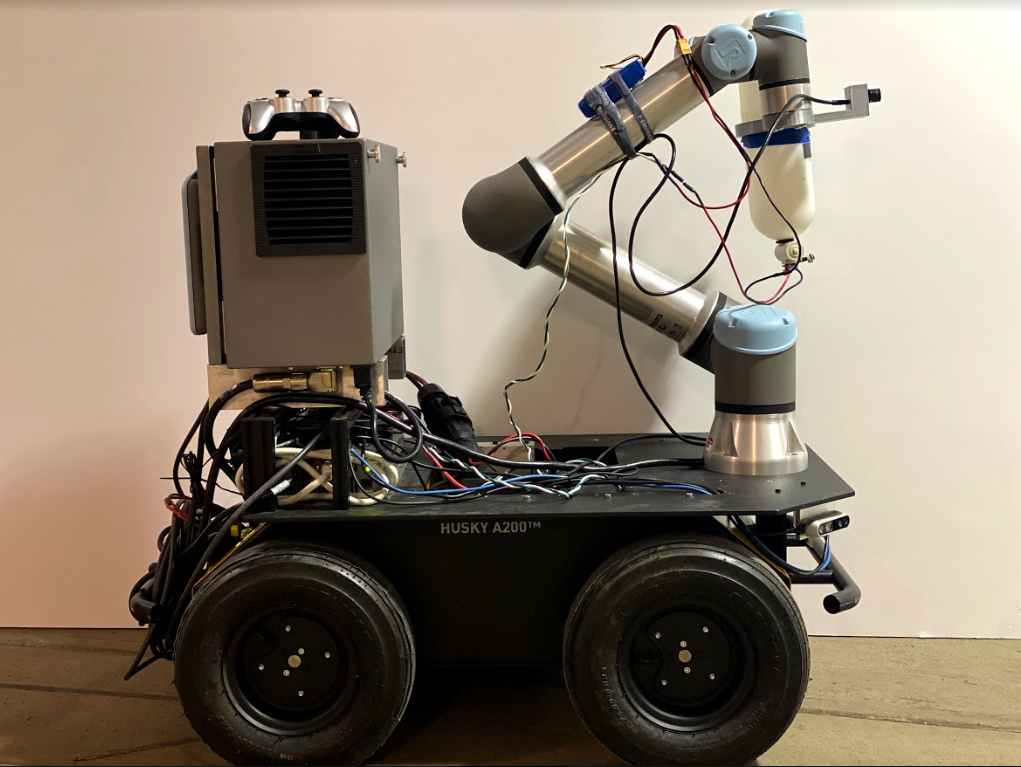 The UGV now features a UR5e arm with 3 Realsense D435i, 1 T265 and 1 thermal camera. The onboard computer on the husky has been changed from ZOTAC to Intel NUC along with a slave computer in the form of NVIDIA Jetson TX2 (which controls the extinguishing mechanism and the thermal camera). Three front stereo cameras are used to create the 2D map of the environment. To prevent the water from dripping/leaking we designed a cork type mechanism such that it prevents the dripping until the AGV actuates the pump for the first time. Arduino microcontroller, a relay circuitry, and a separate Li-Po battery is used to power the water pump.
The UGV now features a UR5e arm with 3 Realsense D435i, 1 T265 and 1 thermal camera. The onboard computer on the husky has been changed from ZOTAC to Intel NUC along with a slave computer in the form of NVIDIA Jetson TX2 (which controls the extinguishing mechanism and the thermal camera). Three front stereo cameras are used to create the 2D map of the environment. To prevent the water from dripping/leaking we designed a cork type mechanism such that it prevents the dripping until the AGV actuates the pump for the first time. Arduino microcontroller, a relay circuitry, and a separate Li-Po battery is used to power the water pump.
Spring Semester Implementation Details
The hardware subsystem is broken down into two components. A aerial vehicle and a land vehicle.
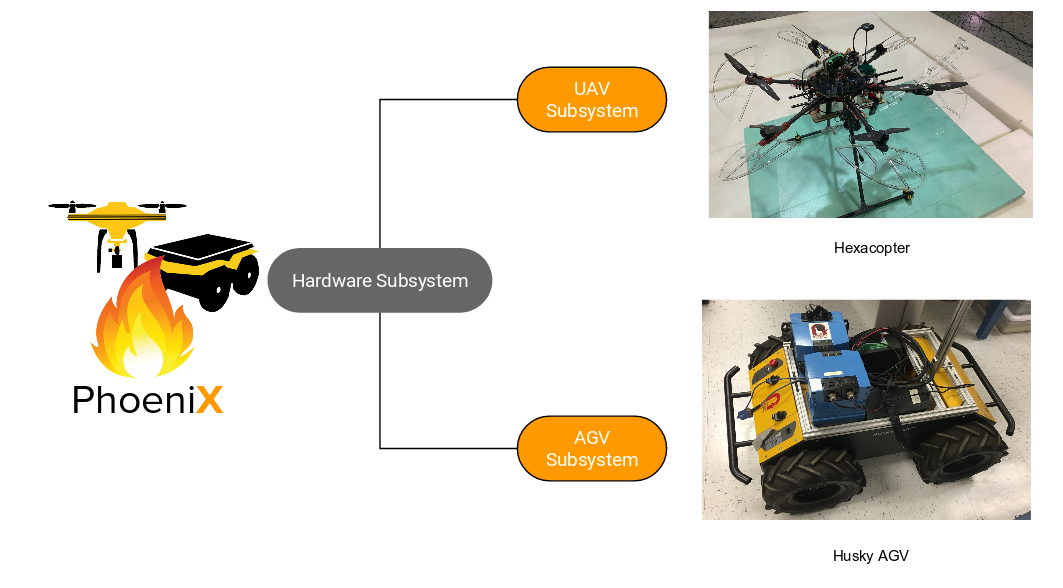 As the system consists of UAVs and AGV/UGVs, we have custom designed our own UAV and used Clearpath Husky as our AGV. The system needs to be loaded with the necessary flight-controllers, on-board computers, cameras for the vision pipeline and various other sensors such as IMU and GPS. Below are the pictures of our hardware implementations till date and we aim to refine the design and add a few more sensors and actuators to the current system to make it more robust, reliable and help us reach the goal of fulfilling our functional requirements. The below picture shows our UAV system and the next shows our UGV subsystem.
As the system consists of UAVs and AGV/UGVs, we have custom designed our own UAV and used Clearpath Husky as our AGV. The system needs to be loaded with the necessary flight-controllers, on-board computers, cameras for the vision pipeline and various other sensors such as IMU and GPS. Below are the pictures of our hardware implementations till date and we aim to refine the design and add a few more sensors and actuators to the current system to make it more robust, reliable and help us reach the goal of fulfilling our functional requirements. The below picture shows our UAV system and the next shows our UGV subsystem.
UAV Implementation Details
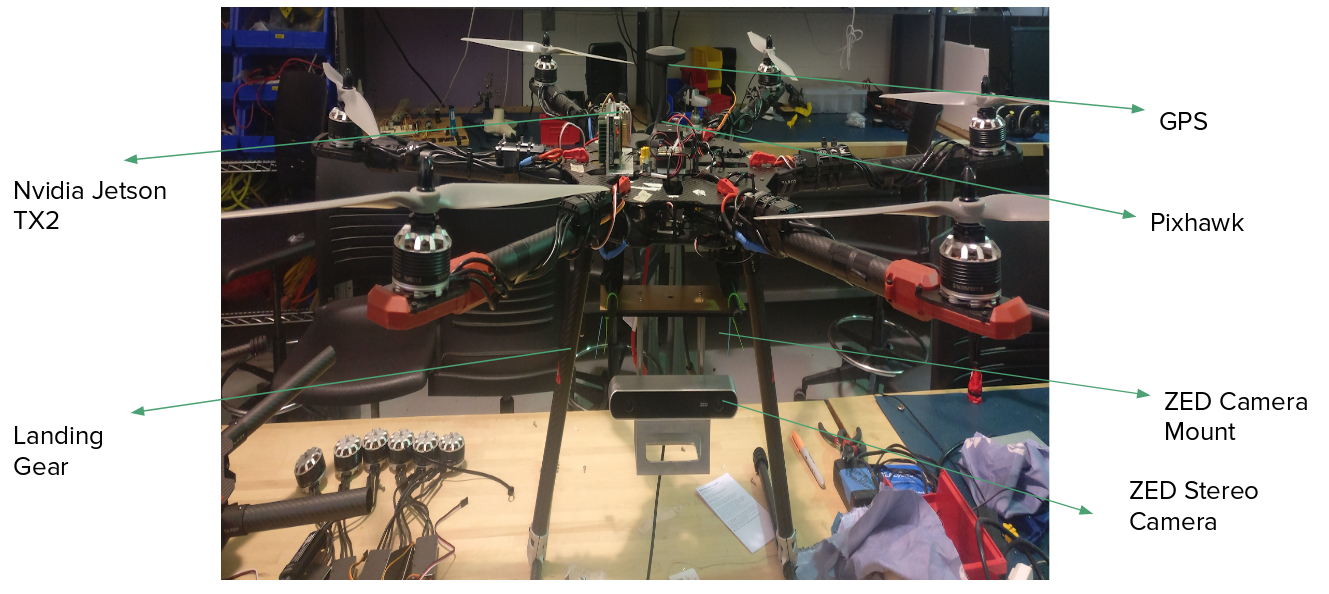 In addition to the above sensors we have also added a Intel Realsense Tracking camera (T265) for localization on both the UAV and UGV.
In addition to the above sensors we have also added a Intel Realsense Tracking camera (T265) for localization on both the UAV and UGV.
UGV Implementation Details
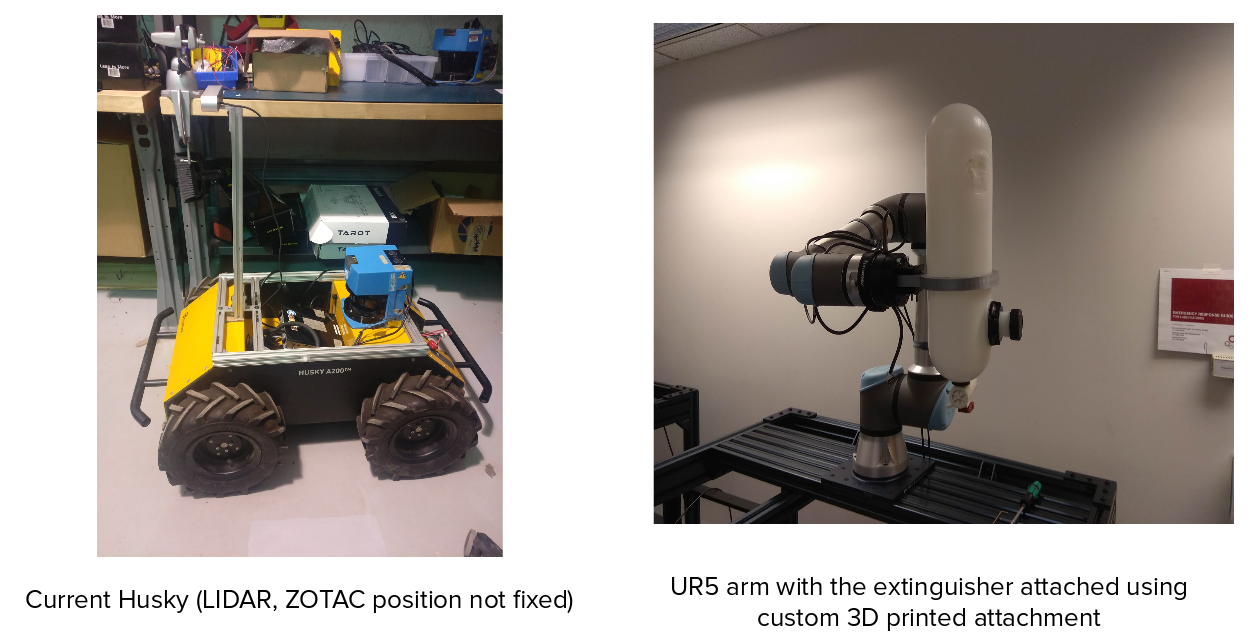 The UGV will also feature a UR5e Arm which has not been attached currently to the system but we have the mounts to attach the extinguisher ready.
The UGV will also feature a UR5e Arm which has not been attached currently to the system but we have the mounts to attach the extinguisher ready.
As per MBZIRC size constraints we have also assembled a UAV which meets the current constraints and it will act as a reserve in case some damage happens to our main UAV. The reserve UAV also features the tilted hex design and which can be seen below.

The videos below provide a better sense of understanding of the UAV and UGV system as on April 5, 2019
Video for UAV:PCB for UGV
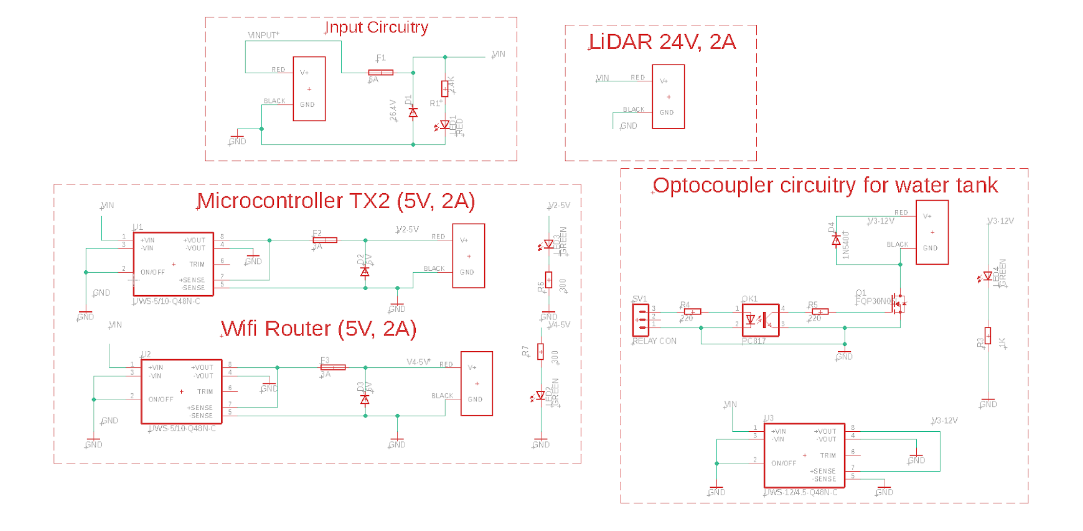
To power the various components on the UGV we have also designed our custom PCB which is capable of powering our LiDAR, cameras, actuators and also the various other sensors such as GPS and IMU. The schematics and various other files related to this PCB can be found in documents section here
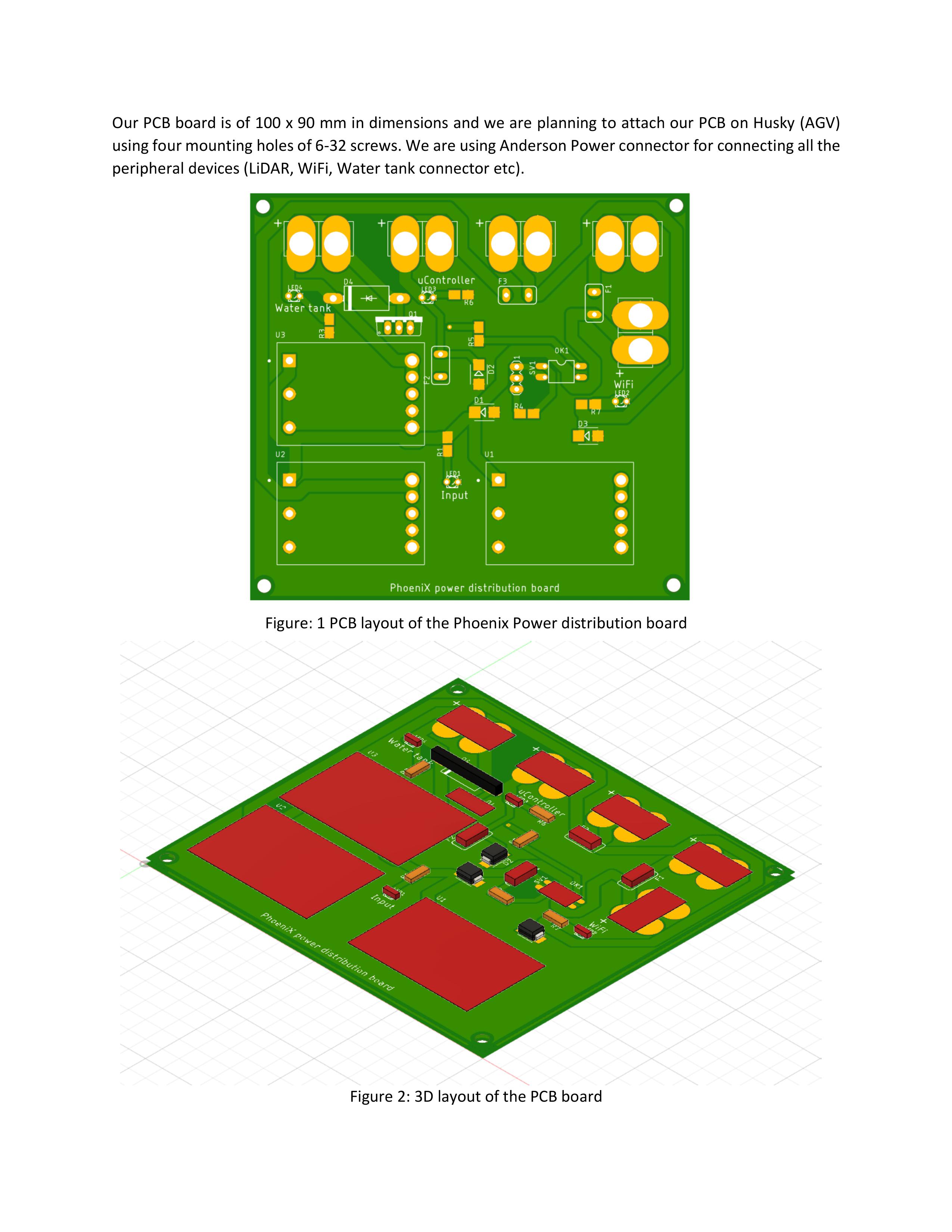
The PCB schematic highlights the various important aspects of the electrical subsystem of the AGV.