Fall 2020 Pictures:
dVRK in simulation:
Our simulation environment in shown in Figure 1 below.
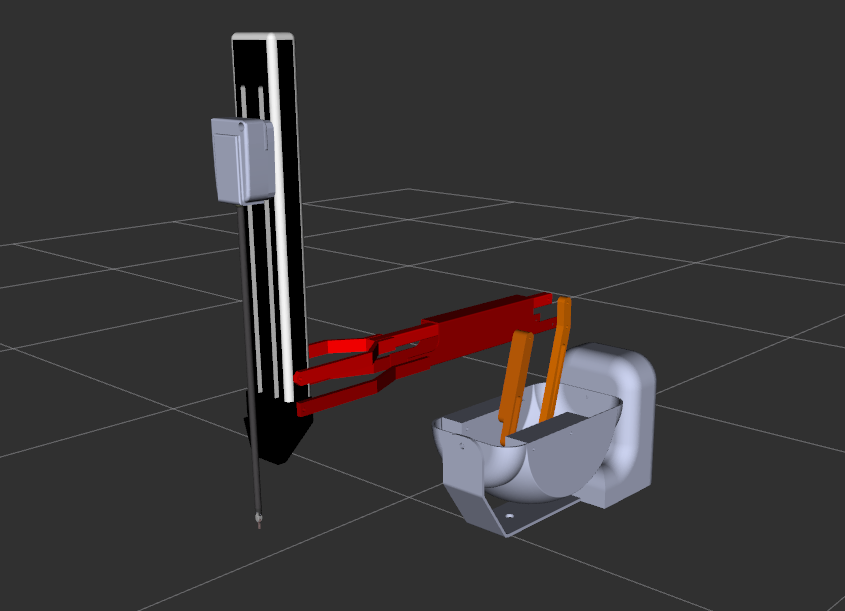
Figure 1: dVRK PSM1 in Biorobotics Lab
Ground truth stiffness map:
Since we did not simulate a force sensor, we arbitrarily assigned tumors on the liver’s surface by picking points to act as tumor centers. A visualization of our ground truth stiffness map is shown in Figure 2.
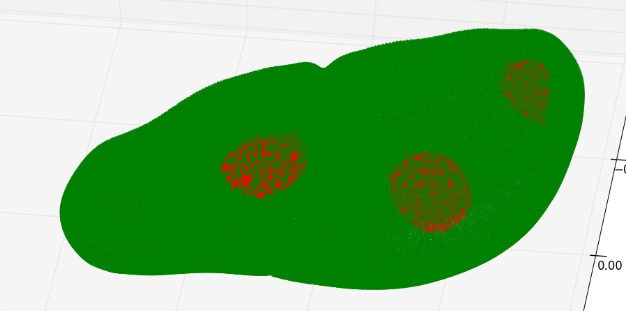
Figure 2: dVRK PSM1 in Biorobotics Lab
Spring 2020 Pictures:
dVRK Workspace:
The da Vinci Research Kit (dVRK) is a retired suite of surgical robots from Intuitive Surgical. Figure 3 shows the Patient Side Manipulator 1(PSM1) of the dual-arm robot. This picture also provides a glimpse of our workspace in the Biorobotics Lab at Carnegie Mellon University.

Figure 3: dVRK PSM1 in Biorobotics Lab
Registration of partial point cloud:
Figure 4 shows the partial point cloud(shown in orange) overlaid on the ground truth CAD model of the liver(shown in white). The ICP algorithm was used to register the two and get an RMSE of 1.188 mm, as seen in Figure 5.

Figure 4: Partial point cloud overlaid on ground truth

Figure 5: Registration result