Schedule
Presenters for the Progress Reviews for Spring 2020:
Progress Review 7, September 16, 2020: Arti Anantharaman
Progress Review 8, September 30, 2020: Anjali Pemmaraju
Progress Review 9, October 14, 2020: Chang Shi
Progress Review 10, October 28, 2020: Alex Wu
Progress Review 11, November 11, 2020: Cora Zhang
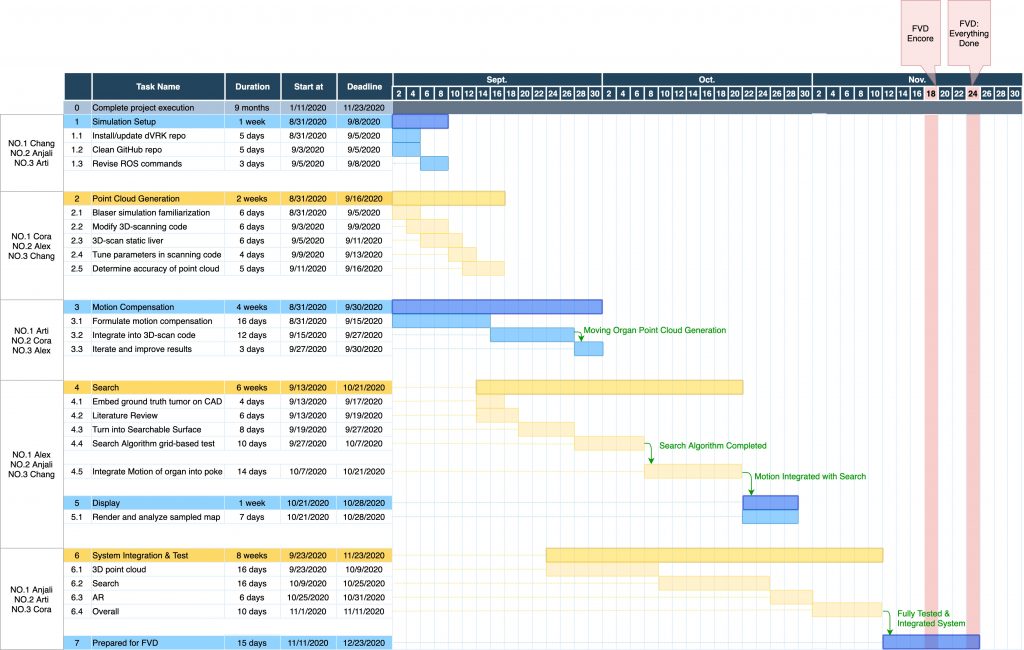
Fall 2020 Gantt Chart
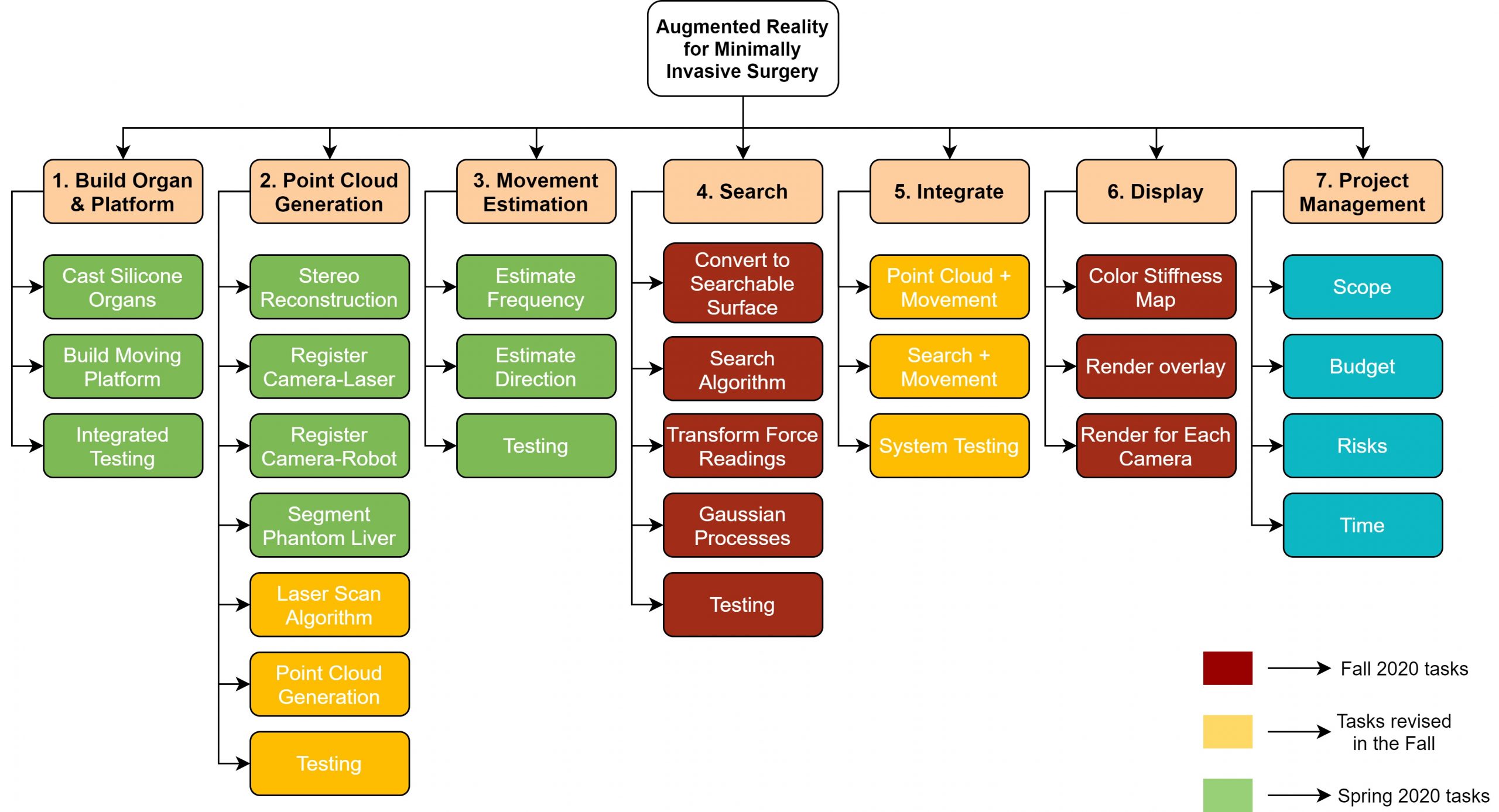
Updated Work Breakdown Structure
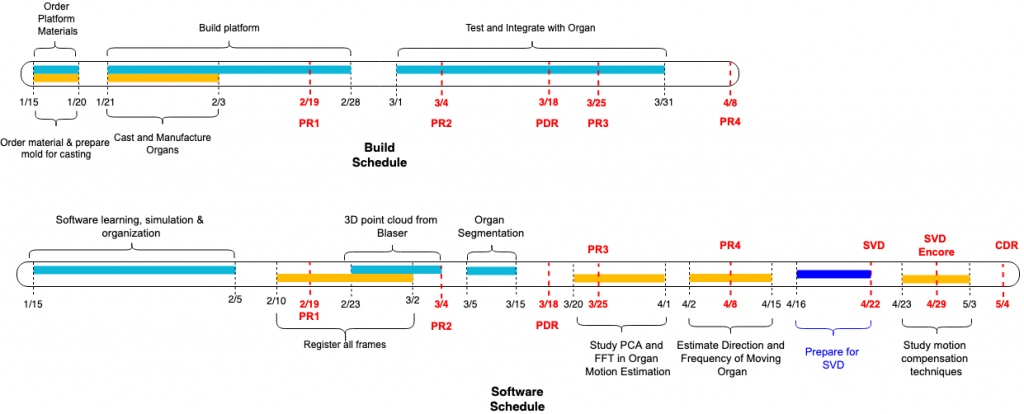
Presenters for the Progress Reviews for Spring 2020:
Sensors and Motors Lab, February 12, 2020: Alex Wu
Progress Review 1, February 19, 2020: Arti Anantharaman
Progress Review 2, March 4, 2020: Anjali Pemmaraju
Progress Review 3, March 25, 2020: Cora Zhang
Progress Review 4, April 8, 2020: Chang Shi
Spring 2020 Schedule