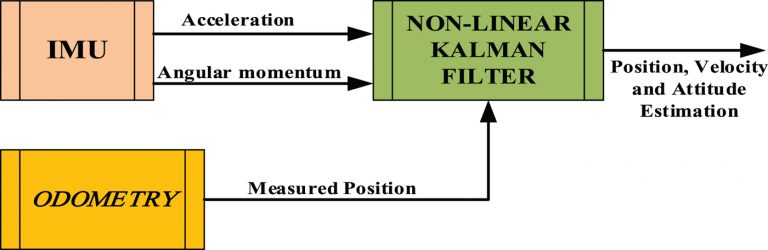
The localization subsystem has two high-level tasks: to localize the follower relative to the leader and localize itself relative to the odom frame/start point. As we don’t have gps as well as no map of the environment, self-localization and odometry based dead-reckoning estimation are a backbone for our path following algorithm. We intend to use … Continue reading Localization