Fall Validation Demo
Below is the one-pager for FVD which explains the Mission flow, demonstration logistics, and the Performance Requirements that were focused on in this demonstration.
Performance Requirement Evaluation Table for FVD
| PR | Set Metric | FVD Metric (Achieved) |
|---|---|---|
| Hotspot detection accuracy | 3 out of 4 = 75% | Out of 6 runs ~ 87% |
| Hotspot localization accuracy | 2.5m | 1m |
| Tree separation for navigation | 5m | 3.8m |
| Flight Time | 5 mins | 16 mins recorded |
| Environment | GPS degraded | GPS denied |
| VIO Drift Accuracy | <4% | <1% |
Subsystem Performance
Phoenix Pro
insert para here (kavin)
GCS+Streaming
insert para here (kavin)
Fire Localization
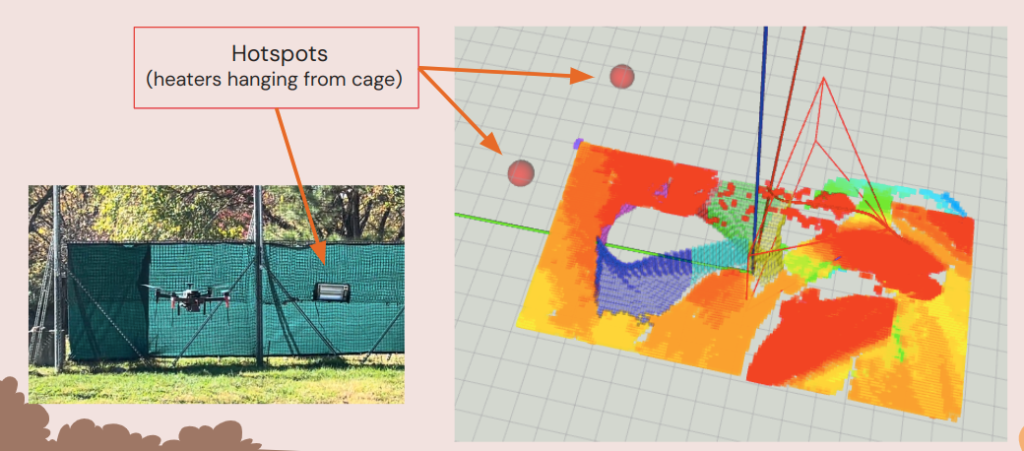
For FVD, we had set up the environment so that the hotspots were at varying heights, on the way to the coarse hotspots, within the exploration region, and outside the virtual boundary (As shown in the figure below. We also demonstrated the run with real-time alterations to the hotspot locations.
For FVD Encore, to show hotspot generalizability, we moved the hotspots to new locations and also demonstrated the clustering quality of our mapping algorithm. This included keeping hotspots at varying distances and reaching a point where 2 hotspots were near enough to be classified as one larger hotspot. Encore also included hotspot variability that was up to the end user.
Our new sensor fusion-based approach for fire localization worked extremely well compared to our implementation demonstrated in SVD. However, we still face the issue of false detections when the heater is partially occluded due to imperfect extrinsic calibration between the D456 depth camera and the FLIR Boson-640 thermal camera.
As demonstrated in the 3 live runs, the platform detected 3/4, 4/4, and 4/4 hotspots respectively. Of these, the last run contained a false positive owing to the calibration limitation mentioned above in the fire localization subsystem performance.
State Estimation
During both the FVD and FVD Encore demonstrations, the module consistently delivered reliable performance across all runs. Even during emergency landings that involved erratic movements of the UAS platform, the drift remained under 1%, significantly surpassing the performance metric of 5%.
Autonomy
insert para here (ishir)