


B.E. in Electrical and Electronics Engineering, Birla Institute of Technology, Mesra.
Motion Planning, Fleet Management, Control Systems
Dhruv has worked for 2.5 years in Warehouse Automation. He has experience in developing end-to-end navigation stacks for a variety of automation solutions, such as GTP systems, Mobile manipulators, autonomous trolleys, and autonomous inventory scanning systems. He also has experience in deploying fleet management solutions for more than 20 robots.
B.Tech. in Production Engineering
Computer Vision, Machine learning, Simulation
Sivvani has worked onsite at the Munich Institute of Robotics and Machine Intelligence and contributed to the research and development of motion generation with vision information to obtain fast point-to-point motion plans. She has 3 years of extensive practical experience in developing industry-relevant solutions in diverse spectrums of CV and has clocked over 800+ hours of research experience.

B.ENG. IN ELECTRICAL AND ELECTRONICS ENGINEERING (WITH A MINOR IN ROBOTICS), NED UNIVERSITY OF ENGINEERING AND TECHNOLOGY, PAKISTAN.
Computer Vision, Machine Learning, Embedded System Design, Software Development
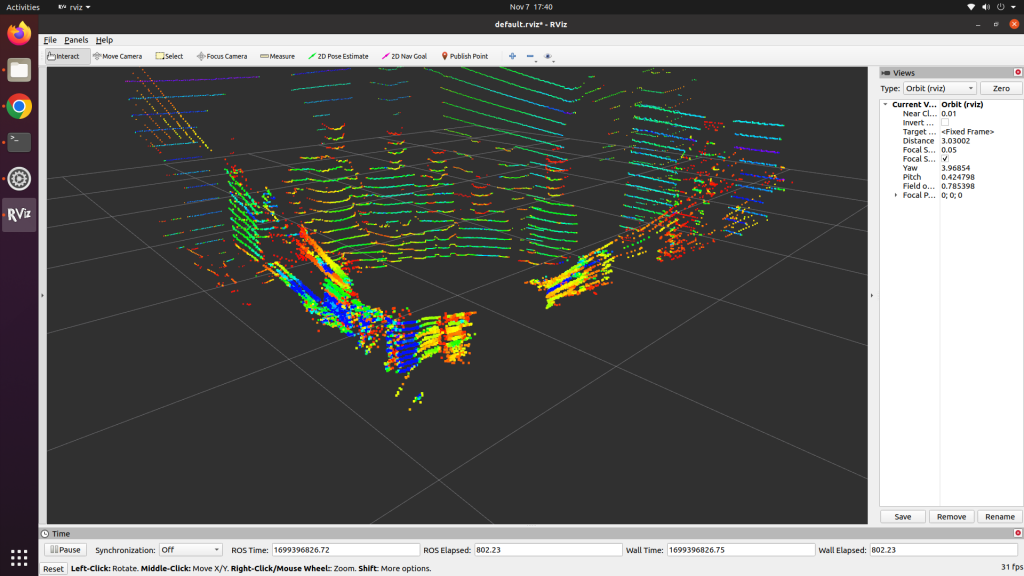
Shahram Najam Syed offers nearly 8 years of expertise (academic and professional) in Computer Vision, Machine Learning, Robotics, Embedded Design, and Software Development, encompassing both academic research and industry experience. At Retrocausal Inc. (2018-2023), as Lead Research Engineer, he spearheaded the creation of a lidar-less A.D.A.S. system, leveraging advanced 3D vision techniques and Android sensors for traffic analysis. His notable achievements include contributing to NASA’s Human Research Program with a focus on human activity recognition, resulting in three U.S. patents and several key publications. As a Senior Robotics Engineer at CrossWing Robotics (2022-2023), Shahram was instrumental in integrating ROS-based systems for the Bishop Cleanbot and enhancing depth estimation and localization technologies to reduce system costs. During his undergraduate research at NEDUET’s Autonomous Systems Lab (2017-2018), he developed Pakistan’s first human-sized humanoid robot, a socially interactive robot, and an all-terrain vehicle, furthering advancements in robotics and autonomous systems.
Bachelor of Technology in Electronics and Instrumentation. Amrita University
Large Scale Control Systems, System Integration
Sashank has worked as a Control System Engineer in the department of Network-based Control Systems at Yokogawa Corporation for two years. He developed control algorithms for the automation of industrial processes such as oil refining and water transmission. He worked on the configuration of SCADA systems and integration of distributed systems for multiple projects.
B. Tech in Electronics and Communication engineering, VNIT India
Machine learning, systems integration
Khush has worked at the Biorobotics lab, CMU as a research associate for 2 years. He primarily worked on offline reinforcement learning and model-free reinforcement learning for locomotion. He also developed the ROS stack for control, sensing, and user interaction with snake robots.