Final demo video
Vid 1: The final video demonstrating capabilities of PERCIV system after FVD encore.
SPRING Demo Video
Vid 2: Summary video after SVD encore.
Picture Gallery
Perception Subsystem
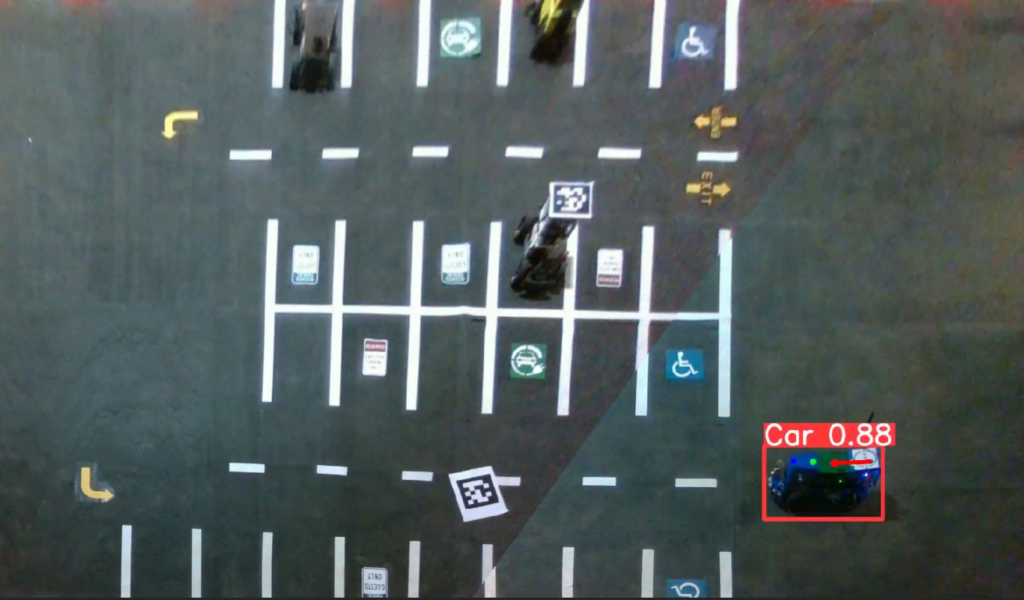
Fig 1. Final Stitched BEV output with Oriented bounding box on Car using Yolo V8 architecture
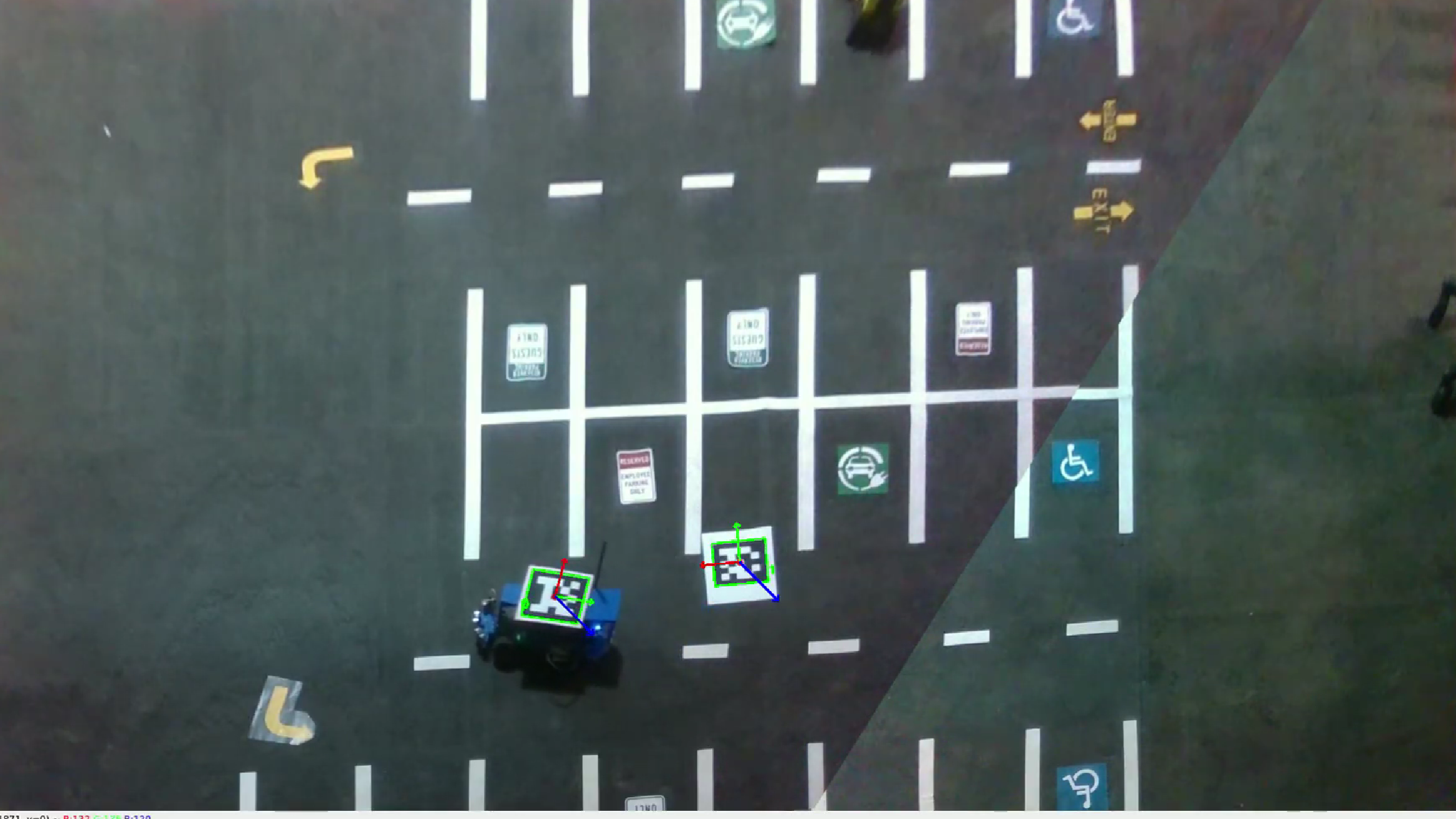
Fig 2. (FVD) Ground truth localization using aruco marker

Fig 3. (SVD) Predicted trajectories using estimated pose and controller input

Fig 4. Green overlay depicting successful parking and within the designated tolerance
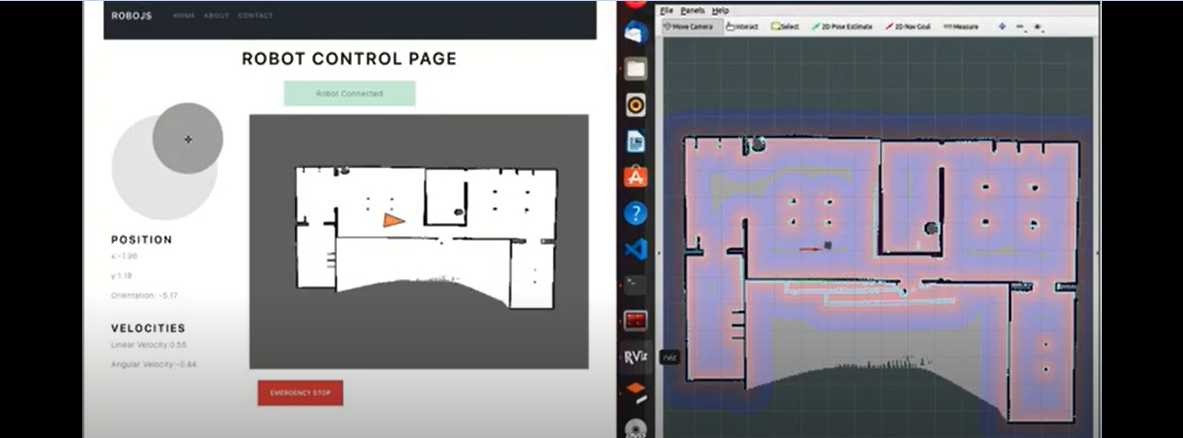
Fig 5. (pre-SVD) UI/UX Barebone Structure
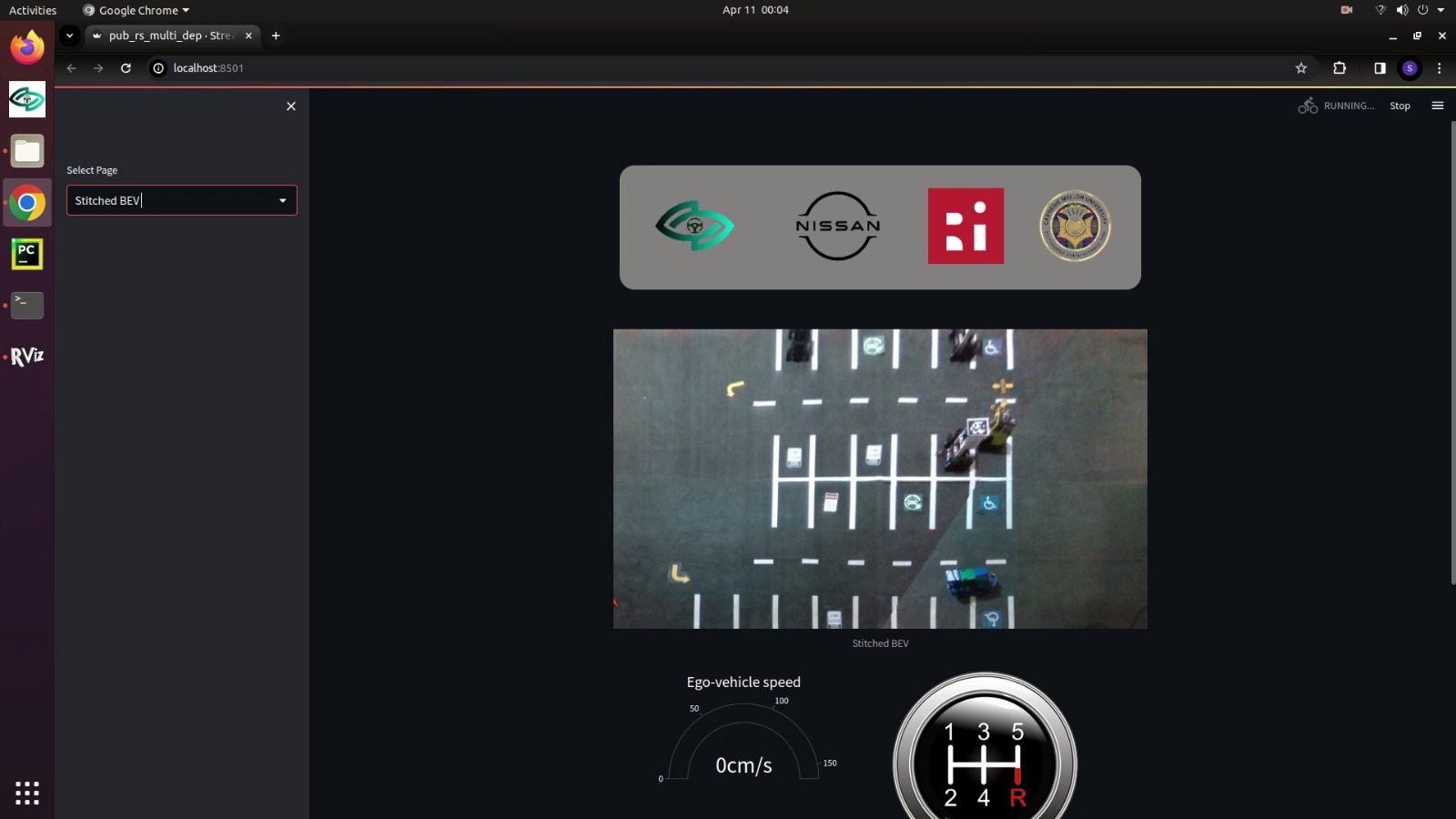
Fig 6. (SVD) UI/UX depicting stitched BEV, speedometer, gear status, and safety override status
Trajectory Prediction

Fig 7. Trajectory Prediction/Steering configuration using Peppy model
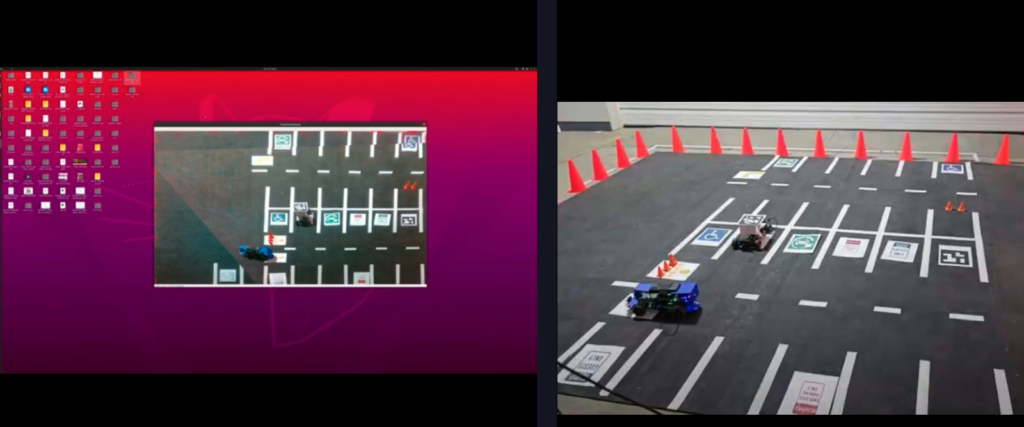
Fig 8. (SVD) UI/UX alongside car controls integration
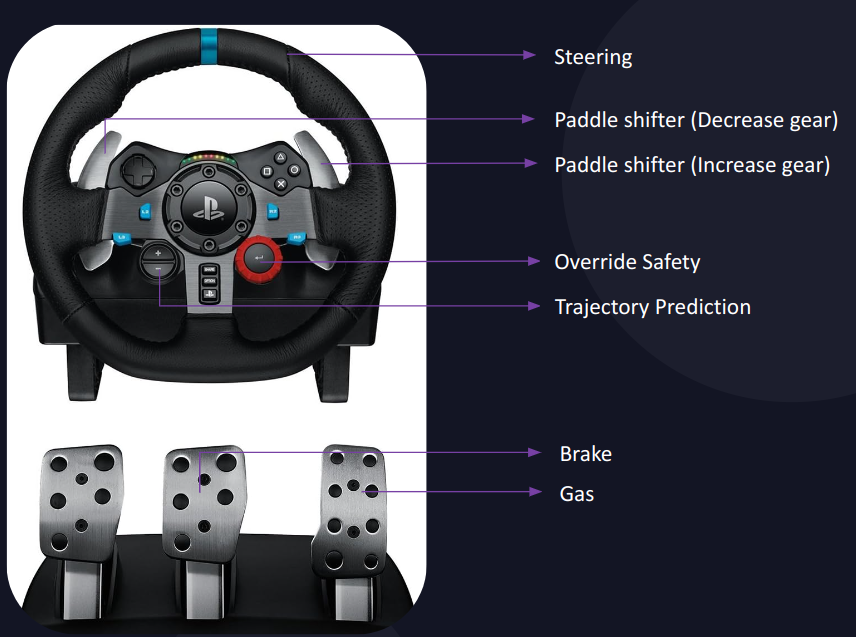
Fig 9. (SVD) User Controller
Team PERCIV working in the real-world.