

Precise Tele-Operation from Infrastructure Cameras
Objective:
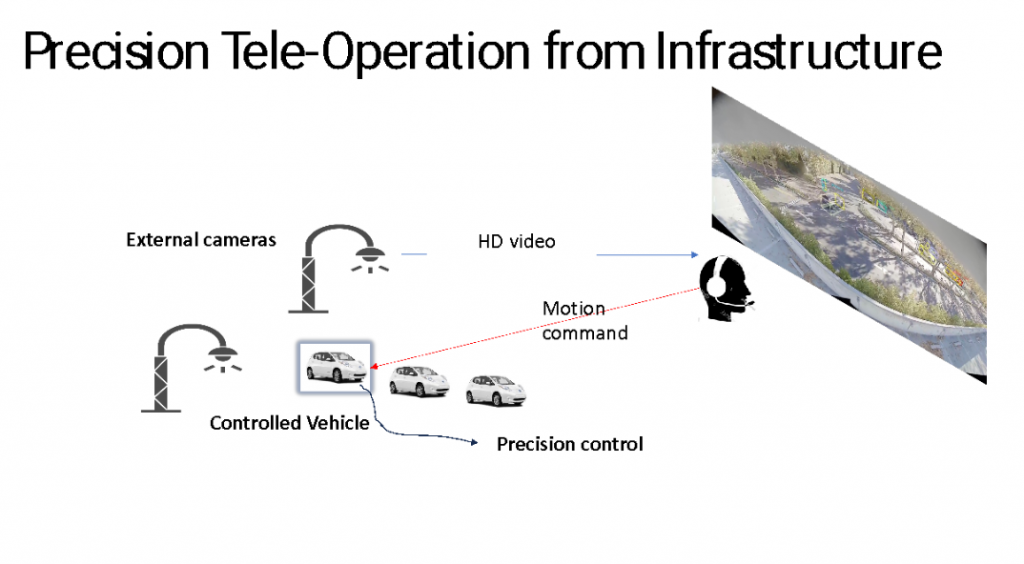
The primary goal is to engineer an innovative system capable of remotely operating electric RC vehicles with high precision. This system relies on feedback from strategically placed elevated external sensors and incorporates odometry data from the vehicles. A notable aspect of this project is the deliberate absence of onboard sensors on the RC vehicles, placing emphasis on external data sources and sophisticated control algorithms.
Technical Overview:
- Tele-Operation System:
- Sensor Setup: Utilize a network of elevated external monocular/depth cameras and LiDAR, positioned to provide comprehensive visual coverage of the operating area. These sensors are not overhead but are mounted on tripods to offer a broad field of view.
- Data Integration: The system will amalgamate real-time video feeds with odometry feedback from the vehicles, creating a detailed operational picture for remote control.
- Off-Board Control Mechanism:
- Control Interface: An off-board computer system will serve as the control hub, processing input from the sensor network. This computer will issue control commands (throttle, steering) to the RC vehicles.
- Feedback Loop: Implementing a feedback loop that takes into account real-time visual and odometry data to adjust vehicle movements accurately.
- Human-in-the-Loop Dynamics:
- Operator Role: A human operator will be integral to the control loop, responsible for making judgment calls and adjustments in complex scenarios, such as parking maneuvers and navigation among other simulated vehicles.
- Simulation Scenarios: The system will be tested in various parking simulations, including parallel parking, pull-in parking, and navigation on a narrow ramp, mirroring real-life parking challenges.
Application and Use Case:
- Simulating Non-Autonomous Vehicle Parking: The project aims to replicate the intricacies of remotely parking vehicles that lack autonomous capabilities.
- Assisting Limited Autonomy Shuttles: The technology will also be applicable in guiding robot shuttles during passenger pick-up and drop-off in tight urban environments.
Project Goals:
- Development of a Prototype: Construct a fully operational valet parking simulator prototype. This prototype should demonstrate the ability of RC cars to navigate between two points, such as turning pads, with precision and reliability.
- Collision Avoidance and Path Adherence: Ensure that the system is robust enough to prevent the RC cars from colliding with each other or deviating from their intended paths.
- Software Infrastructure: The team will be responsible for the creation of a comprehensive software suite that powers the entire operation, from camera feed processing to vehicle control logic.
- Academic Contribution: Aim to contribute to the field of robotics by documenting the project’s innovations and results in a paper suitable for submission to a leading robotics conference.
Purpose and Relevance:
This project seeks to push the boundaries of remote vehicle control technology. By focusing on external control mechanisms and excluding onboard vehicle sensors, the project explores new avenues in remote operation and control systems. Its applications are relevant in advancing methods for remotely managing non-autonomous vehicles and providing assistance to autonomous vehicles in constrained and complex urban settings.