Schedule
Our Presenter Round Robin for the Fall’24 semester is as follows:
| PR01 | Shahram Najam Syed |
| PR02 | Sri Sashank Undavalli |
| PR03 | Sivvani Muthusamy |
| PR04 | Khush Agrawal |
| PR05 | Dhruv Gupta |
Our Presenter Round Robin for the Spring’24 semester is as follows:
| PR01 | Khush Agrawal |
| PR02 | Shahram Najam Syed |
| PR03 | Sivvani Muthusamy |
| PR04 | Sri Sashank Undavalli |
| PR05 | Dhruv Gupta |
Project Development Schedule for Fall 24:
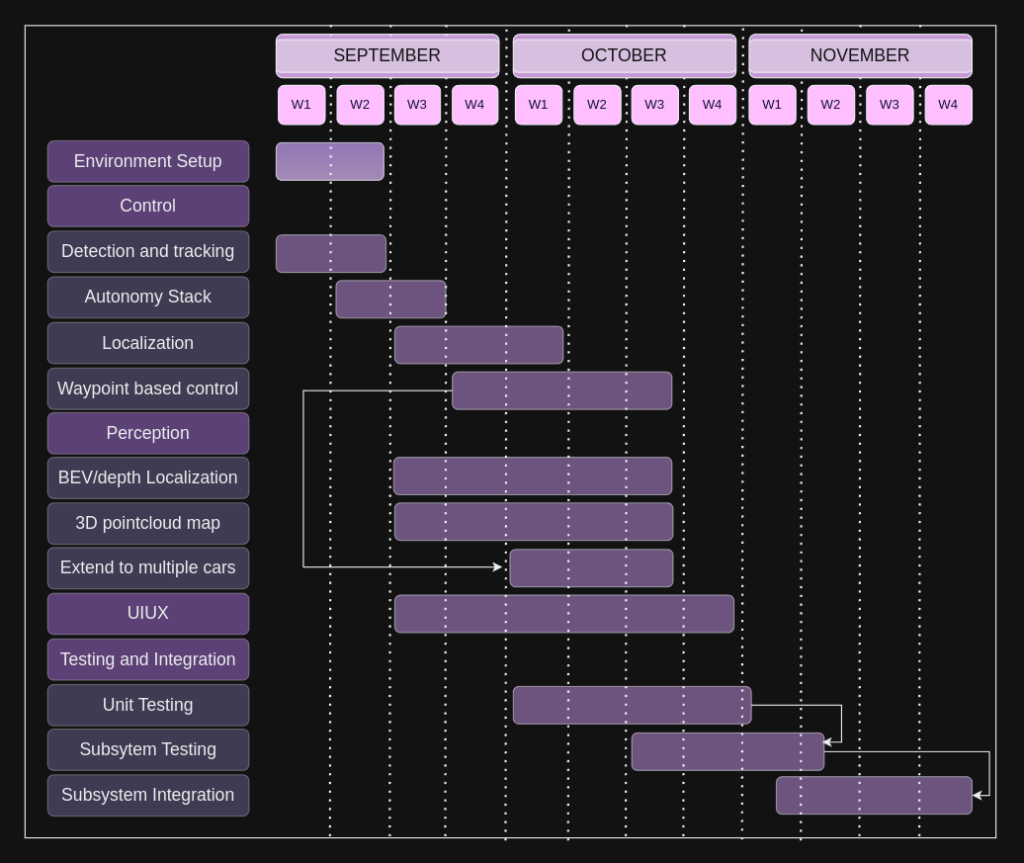
Project Development Schedule for Spring 24:

Fall Test Plan
FVD Demo Conditions:
Location: Newell-Simon Hall B Level
Equipment: Testbed emulating a parking lot, 2 x tripods, 2 x infrastructure stands, 3 RC car unit, 2 x Intel RealSense D435i, 1 x external compute (main processing & display unit), Logitech steering and pedal setup, Wi-Fi router (for local intra network for secure DDS sharing), monitor(s).
Objectives of demonstration with corresponding requirements:
FVD.1: Detect, track, and estimate the pose of 2 RC cars.
FVD.2: Compute and communicate motion and parking cues to the respective RC cars.
FVD.3: Control 2 cars independently using independent motion and parking.
FVD.4: Park RC car for the parking scenario with static obstacles using pedals and steering
FVD.5: Park RC car successfully 80% of the time (PR2, PR3, PR5).
FVD.6: Drive the RC cars at an average speed of 10 cm/s (PR4).
Procedure:
01. Place the tripods mounted with the RealSense D435i at oblique angles, and the infrastructure stands, getting overlapping coverage for all cameras.
02. Power on the intranet WiFi router, off-board sensors, and RC car(s).
03. Configure the RC cars and connect to the off-board computer.
04. Launch software stack for all the sub-systems (RC cars, external computer).
05. Perform sub-system level hierarchical predefined tests (H/W & S/W).
06. Proceed with the demonstration if no errors are reported; otherwise, follow unit tests for rooting out system failures.
07. Provide the operator with control instructions.
08. Place the RC car at a predefined initial area.
09. The operator is asked to drop waypoints leading to the desired goal(s).
10. The operator will verify proper plan creation and engage the controller.
11. Once the car has reached designated parking spot (final waypoint), the operator takes over control and teleoperates the car to the parking lot.
12. Repeat steps 08 – 12.
13. Document performance against defined requirements and validate.
Success Criteria:
SC.1: Successful parking is detected 80% of the time.
SC.2: A safety tolerance of 5 cm is maintained at all times from obstacles.
SC.3: The user has the ability to operate 2 cars while maintaining SC.1 and SC.2.
SC.4: The car(s) will autonomously traverse 80% of the total path length.
Verification Method:
- Comparison of PERCIV against ground truth generated using ArUco tags
- Treating the pose of the RC car as ground truth, the translational and orientation error after parking is observed.
Spring Test Plan
SVD Demo Conditions:
Location: Newell-Simon Hall B Level
Equipment: Testbed emulating a parking lot, 2 x tripods, 1 RC car unit, 2 x Intel RealSense D435i, 1 x raspberry pi (data aggregation unit), 1 x external compute (main processing & display unit), Logitech steering and pedal combo, Wi-Fi router (for local intra network for secure DDS sharing), monitor, stopwatch.
Objectives of demonstration with corresponding requirements:
SVD.1: Detect, track, and estimate the pose of 1 RC car.
SVD.2: Compute and communicate motion and parking cues to the 1 RC car (PR1).
SVD.3: Low-level control on RC car to meet motion and parking cues.
SVD.4: Park RC car for the parking scenario using pedals and steering (PR4, PR5).
SVD.5: Park RC car successfully 80% of the time (PR2, PR3, PR5).
SVD.6: Drive the RC car at an average speed of 10 cm/s (PR4).
Procedure:
01. Place the tripods mounted with the RealSense D435i at oblique angles, getting overlapping coverage for both cameras.
02. Power on the intranet WiFi router, off-board sensors, and RC Units.
03. Configure the RC car and connect to the off-board compute.
04. Launch software stack for all the sub-systems (RC car, off-board compute, data aggregation unit, and external compute).
05. Perform sub-system level hierarchical predefined tests (H/W & S/W).
06. Proceed with the demonstration if no errors are reported; otherwise, follow unit tests for rooting out system failures.
07. Provide the operator with control instructions.
08. Place the RC car at a predefined initial area.
10. The operator is asked to park the car without the visual cues or BEV.
11. Parking status is shown as completed by the system.
12. Repeat steps 08 – 11. Document performance against defined requirements and validate.
Success Criteria:
SC.1: Successful parking is detected 80% of the time.
SC.2: A safety tolerance of 10 cm is maintained at all times from obstacles.
Verification Method:
- Comparison of PERCIV against ground truth generated using ArUco tags
- Treating the pose of the RC car as ground truth, the translational and orientation error after parking is observed.
Parts List
As of the current stage of the project, significant purchases have been made in line with the allocated budget. A total expenditure of $3108 has been utilized out of the total budget of $5000, representing 62% of the allocated funds. These expenditures encompass crucial components necessary for the development and implementation of the teleoperated parking system, including the procurement of Jetacker cars, infrastructure, and HMI equipment.
| Budget | ||
| S.No | Item Description | Price |
| 1 | Yahboom Jeston Nano Smart Robot Car Kit(R2 Standard) | $643 |
| 2 | NEEWER Tripod Fluid Head | $38.15 |
| 3 | 8 Pieces Camera Screw Adapter | $10.49 |
| 4 | Frgyee 12 Pcs 1/4″ 3/8″ Light Stand Adapter | $11.65 |
| 5 | Lockport White Gaffer Tape 2 Inch – 2 Pack – 30 Yards | $21.19 |
| 6 | Lockport Black Gaffers Tape 3 Pack | $26.34 |
| 7 | NEEWER Tripod Fluid Head | $107.97 |
| 8 | waveshare Power Supply for Jetson Nano | $38.97 |
| 9 | SanDisk Ultra 128GB | $95.94 |
| 10 | 8 Pieces Camera Screw Adapter | $10.49 |
| 11 | Frgyee 12 Pcs 1/4″ 3/8″ Light Stand Adapter | $11.65 |
| 12 | Logitech G29 Driving Force Racing Wheel and Floor Pedals | $379.99 |
| 13 | Beikell Memory Card Reader | $17.98 |
| 14 | Memory Card Case | $6.99 |
| 15 | 12 Inch Traffic Training Cones | $53.98 |
| 16 | 12 Inch Traffic Training Cones | $26.99 |
| 17 | Dell Multi-Device Wireless keyboard and mouse | $76.99 |
| 18 | Dell Wireless Keyboard and Mouse – KM3322W | $24.99 |
| 19 | Acer Monitor 27 inch | $109.99 |
| 20 | Cat 6 Cables 100ft | $30.38 |
| 21 | Anker usb C hub(6 in one) | $70.00 |
| 22 | hc sr04 ultrasound sensors 10 pc | $14 |
| 23 | ITD ITANDA 10FT USB Extension Cable USB 3.0 Extension Cord Type A Male to Female 15 feet | $48 |
| 24 | Yahboom AI Robotic Car Chassis kit Autopilot Training Ackerman | $360 |
| 25 | NVIDIA Jetson Nano Developer Kit (945-13450-0000-100) | $298 |
| 26 | Arduino Mega 2560 REV3 [A000067] | $97.80 |
| 27 | TP-Link Archer T2U Plus AC600 High Gain Dualband USB WLAN Adapter | $72 |
| 28 | 120pcs 10cm Dupont Wire Male to Female Breadboard Jumper Wires 3.9 inch 1pin-1pin 2.54mm Connector | $7 |
| 29 | 120pcs 20cm Dupont Wire Male to Female Breadboard Jumper Wires 7.9 inch 1pin-1pin 2.54mm | $7 |
| 30 | 500PCS 1 Pin Header Connector Housing for Dupont Wire Jumper Compact | $7.89 |
| 31 | Lockport Black Gaffers Tape 3 Pack | $27.89 |
| 32 | Lockport White Gaffers Tape 2 Inch – 2 Pack White Tape – 30 Yards | $19.88 |
| 33 | 10PCS/LOT Ultrasonic Sensor Mounting Bracket for HC-SR04 Smart Car AL HC-SR04 HC SR04 HCSR04 Distance Sensor (10PC hc-sr04 Mounting Bracket) | $16.98 |
| 34 | Explux High-Intensity Yellow LED PAR38 Flood Light Bulb, 250W Equivalent Ultra Bright Yellow Light, Full-Glass Outdoor Waterproof & Anti-Ageing, Dimmable, Yellow Color Spotlight, 2-Pack | $45 |
| 35 | Monoprice 1.5-Feet USB 2.0 A Male to B Male 28/24AWG Cable (Gold Plated) (105436),Black | $25 |
| 36 | USB to USB Cable [13cm 5 inch],USB 3.0 Male to Male Type A to Type A | $40 |
Issue Log
| Issue ID | Issue Subsystem | Date Created | Raised By | Owner | Description | Priority | Severity |
| I-1 | Hardware | 01/16/2024 | Sashank | Sashank Khush | Basic collision checking | Medium | Low |
| I-2 | Perception | 01/20/2024 | Shahram | Sashank Dhruv | Time lag for multi camera synchronization | High | High |
| I-3 | Perception | 01/30/2024 | Sivvani | Dhruv Khush Sashank | Low resolution during BEV generation | Medium | High |
| I-4 | Logistics | 02/06/2024 | Sashank | Sashank Sivvani | Order second car | Medium | High |
| I-5 | Controls | 02/10/2024 | Dhruv | Dhruv Shahram | Issue with odometry being published | Medium | Medium |
| I-6 | Controls | 02/10/2024 | Khush | Dhruv Khush Sashank | Network latency | Medium | Medium |
| Issue ID | Issue Subsystem | Date Created | Raised By | Description | Priority | Severity | Mitigation |
| R-1 | Controls | 03/28/2024 | Khush | Difficulty in controlling speed (only one gear) | Low | High | Add gears for finer speed control |
| R-2 | Controls | 03/20/2024 | Dhruv | Car colliding on sides with only front / rear ultrasound sensors | High | High | Use additional side sensors for avoiding side collisions |
| R-3 | Logistics | 03/10/2024 | Sashank | Procurement Delays | Low | Medium | Order early. Look for locally available products and faster shipping options |
| R-4 | Perception | 04/01/2024 | Shahram | YOLO data annotation produces wrong format of corners | Low | High | Exported data as PASCAL VOC format with auto-orientation pre-processing enabled and converted to YOLOV8-OBB format |
| R-5 | Logistics | 03/25/2024 | Sivvani | Faulty parts/breakdown of parts/ loss of parts | Medium | High | Order spare parts keeping in mind the fiscal impacts |
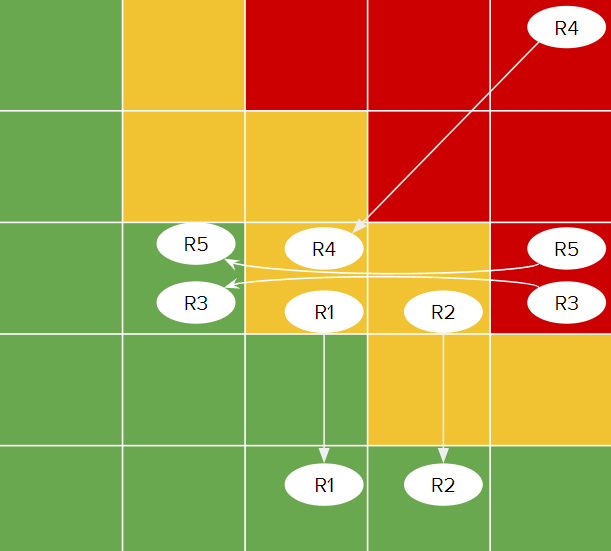
Risk Management
| Risk ID | Description | Risk type | L | C | Mitigation |
| R1 | Components not arriving on time | Schedule | 3 | 3 | Ordered from reliable vendors / ahead of time |
| R2 | Unable to meet the budget requirements | Cost | 2 | 4 | Use existing setup |
| R3 | Communication failure | Technical | 2 | 5 | Setup local network and use suitable protocol |
| R4 | Depth scaling | Technical | 5 | 5 | Use sensor fusion techniques (LiDAR) |
| R5 | Fisheye effect in BEV | Technical | 3 | 5 | Use DL based techniques |
Risk Likelihood-Consequence Matrix