NOTE: The Manipulation subsystem did not change throughout since the last update and till the SVE.
CHOMP Planner
During this semester the Manipulation subsystem has seen some immense changes of which one is the integration of the CHOMP Planner. The CHOMP Planner stands for Covariant Hamilton Optimization for Motion Planning. The advantage of this optimization over a Regular RRT with Path Shortening is that it tries to emerge with a path which is approximately on a straight line joining the end-effector to the object.
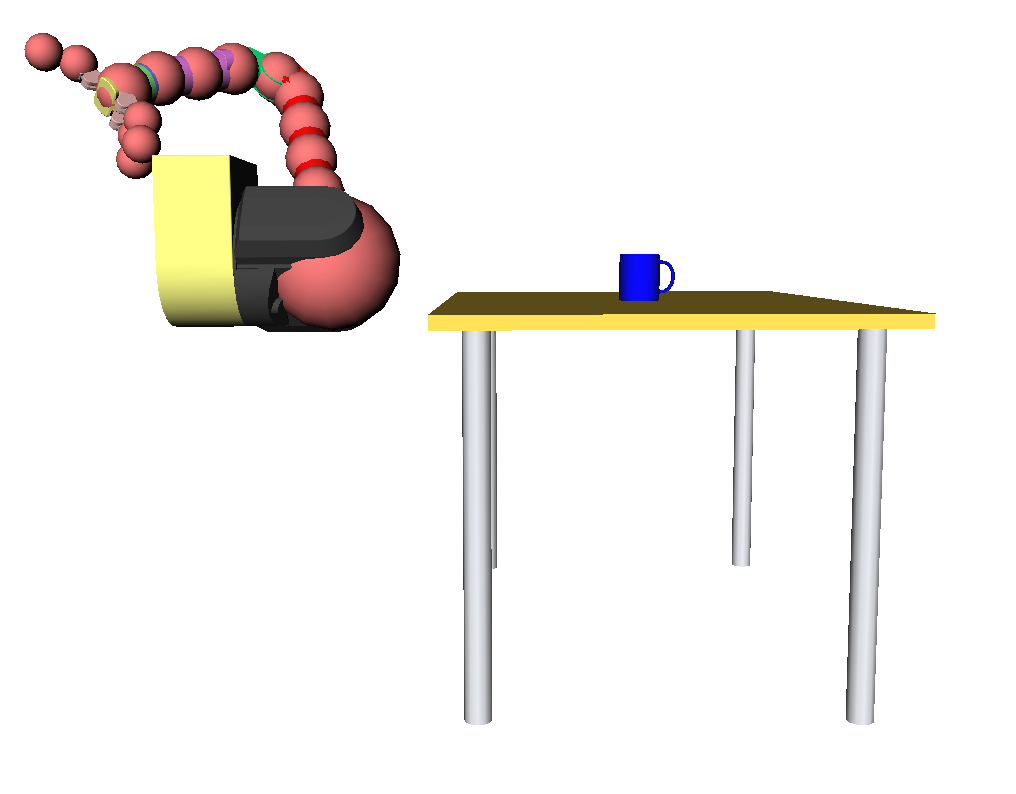
The figure above shows the spherical approximation of our ADA arm and the figure down below is the sample script which depicts the WAM arm as provided by the OpenRAVE and Personal Robotics Lab repositories.

Spherical Approximation of the ADA Arm
Spherical Approximation of the WAM Arm
Planning in a Cluttered Environment
The following videos state beget the reason for a heuristic that is required to plan in the clutter. It is clear that the shortest time to plan occurs when there are no obstacles in between the robot base and the target object. Thus, clearly, the objects in the way should be removed to aid in shorter planning times and hence the task has to be broken down by clearing the objects which are nearest to the robot are cleared first and followed by the target object.
A simulation video with CHOMP in action and depicting planning time when there are NO obstacles
Video Showing planning when there IS an obstacle between the robot and the target object
Video showing what if the soup can(obstacle) was planned for first
Heuristic for Planning in Clutter
The following are screen shots from an API for planning in clutter which takes into consideration:
- Distance and angular placement of the target object
- Shape and Pose of the object
- A visualization of an obstacle-free region
- The moves that the robot must make to place the obstacles in a new place.
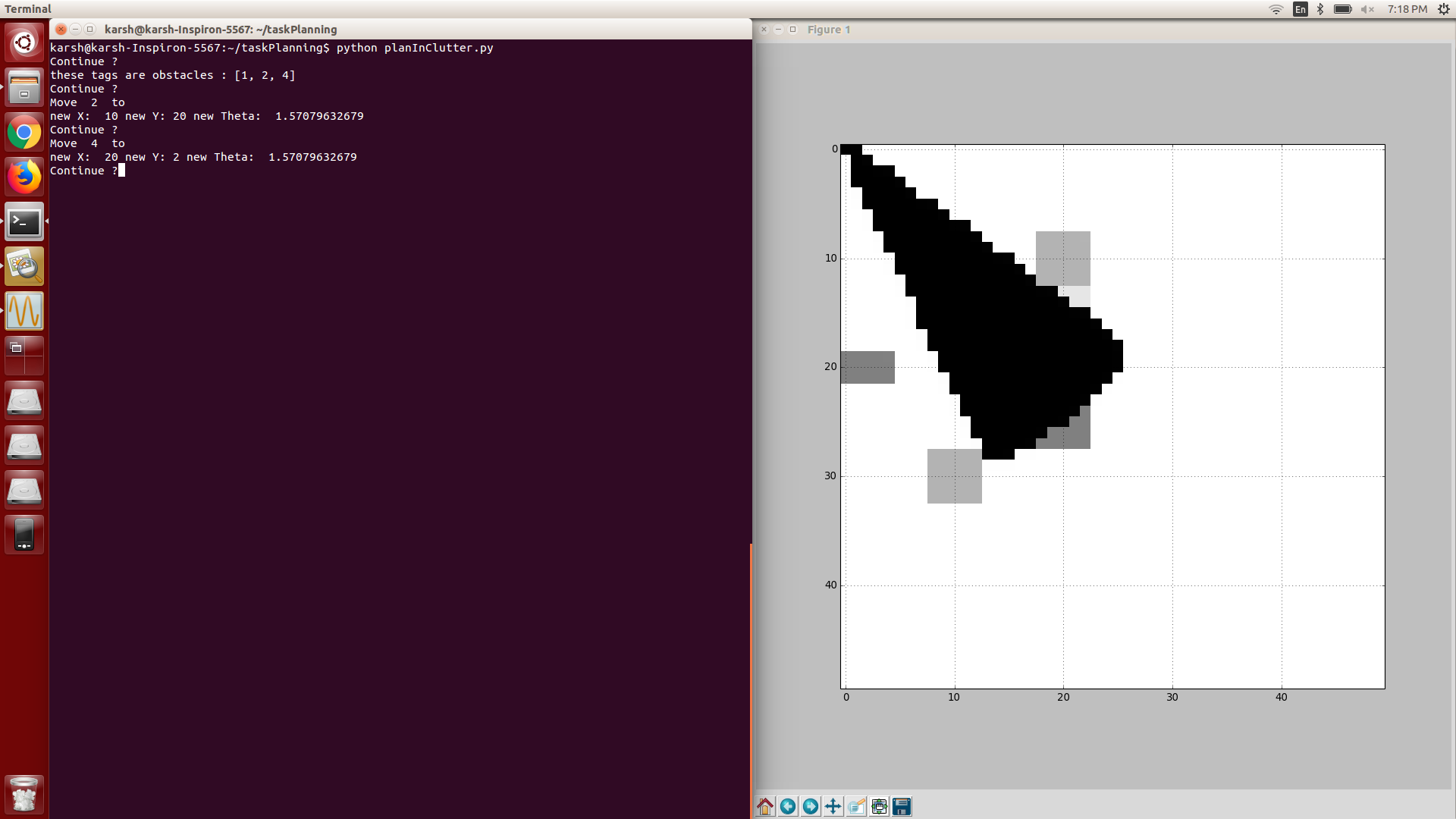
A Screen shot which visualizes the region of obstacles and then shows the move which must be made on the obstacle
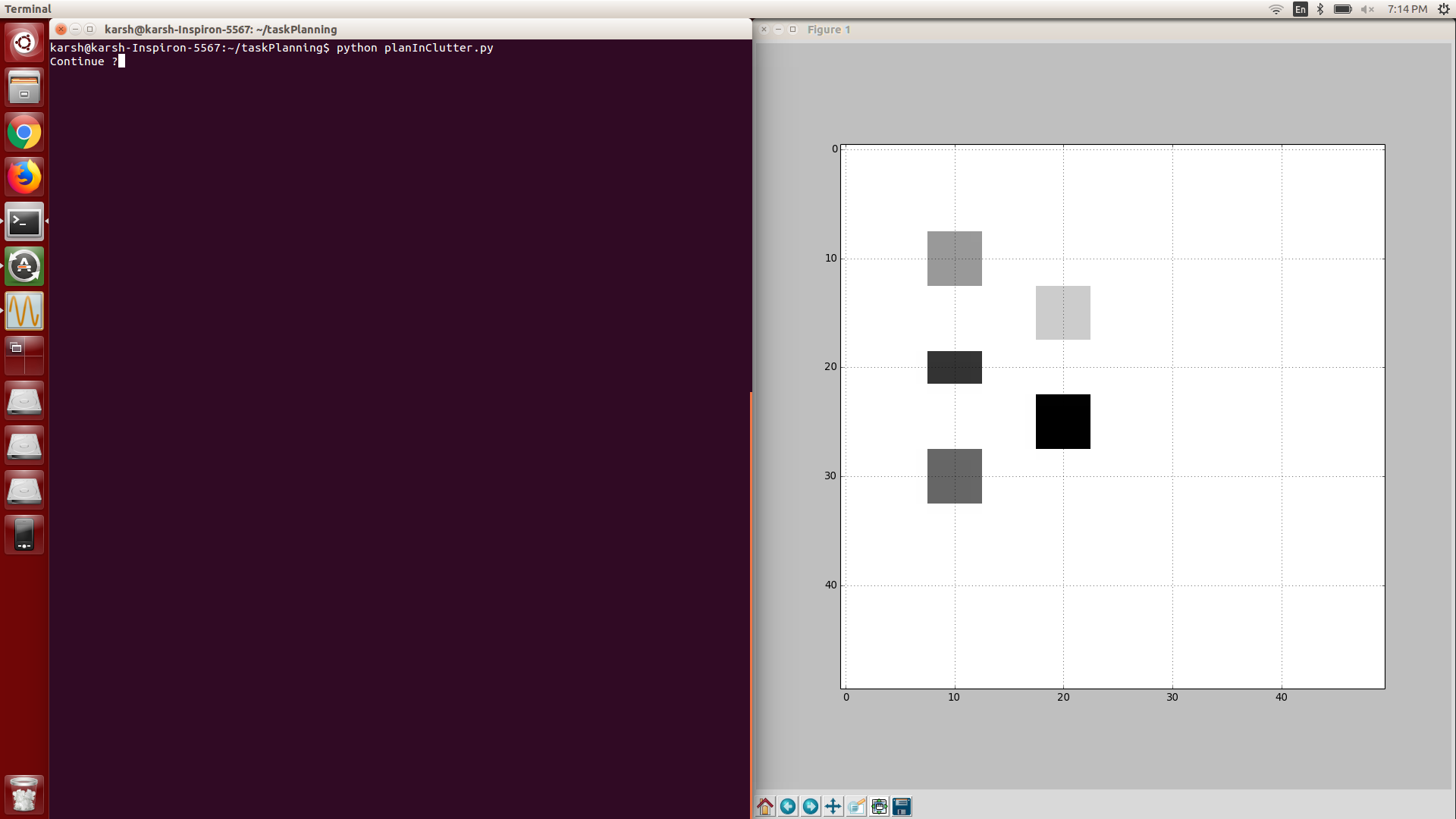
A Screen shot from the API Showing the object foot prints. The various color intensities (black and white) depict the tag number of the objects
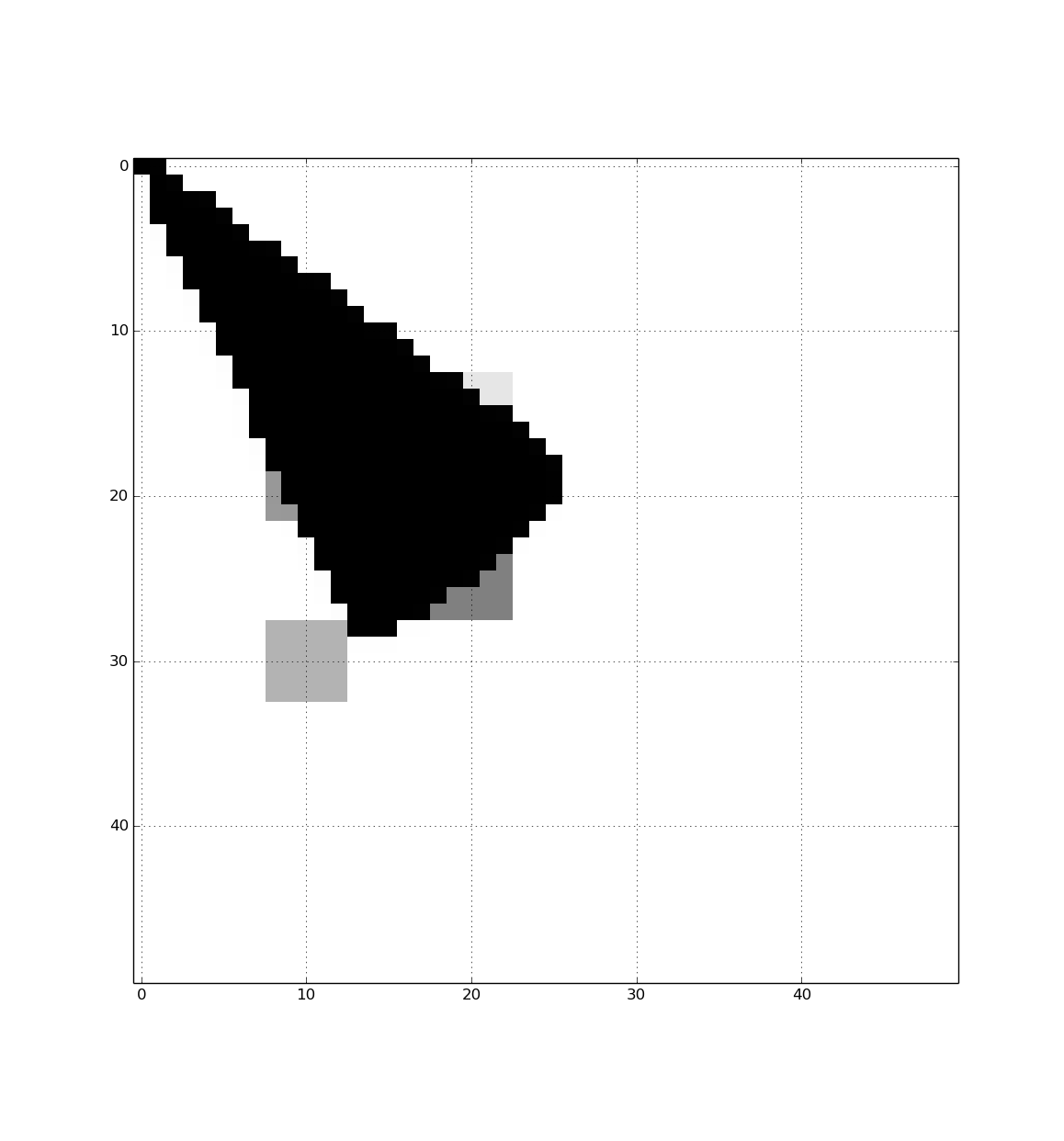
Discrete Map of the objects on the table and the discrete arcular region as a heuristic