Our FVE Performance can be found here
TLDR? watch the video here
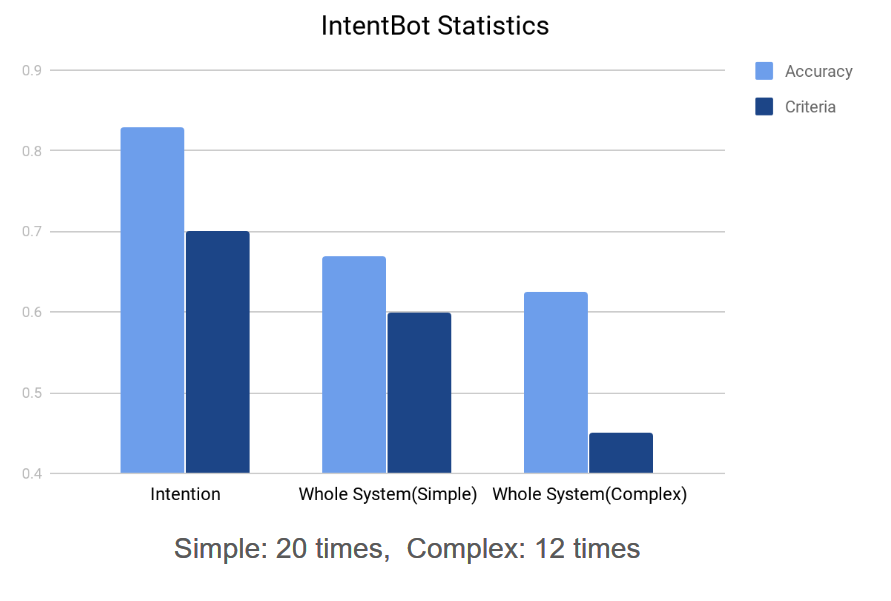
SVE Performance Statistics and Highlights
Figures below explain the two scenarios where we tested our system. We used two scenarios:
- Complex Scenario
- Simple Scenario
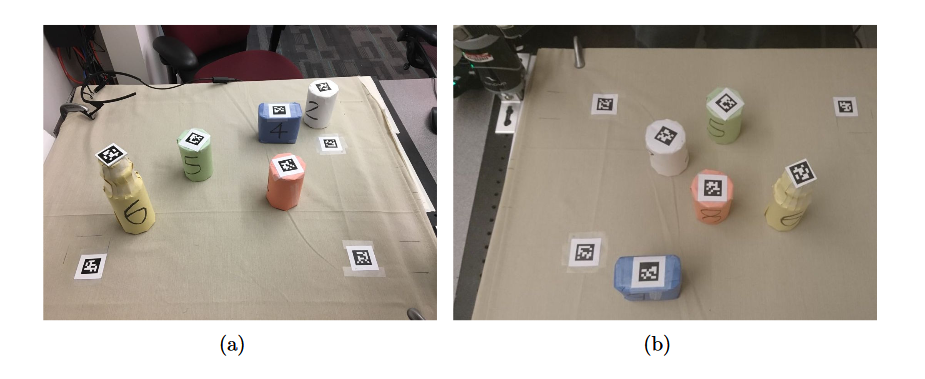
Figure(above) (a) An example of simple scenario(The orange one is the obstacle and the
green one is the target). (b) An example of complex scenario(The orange, green and
white are the obstacles and the yellow one is the target).
Some Key Noteworthy points:
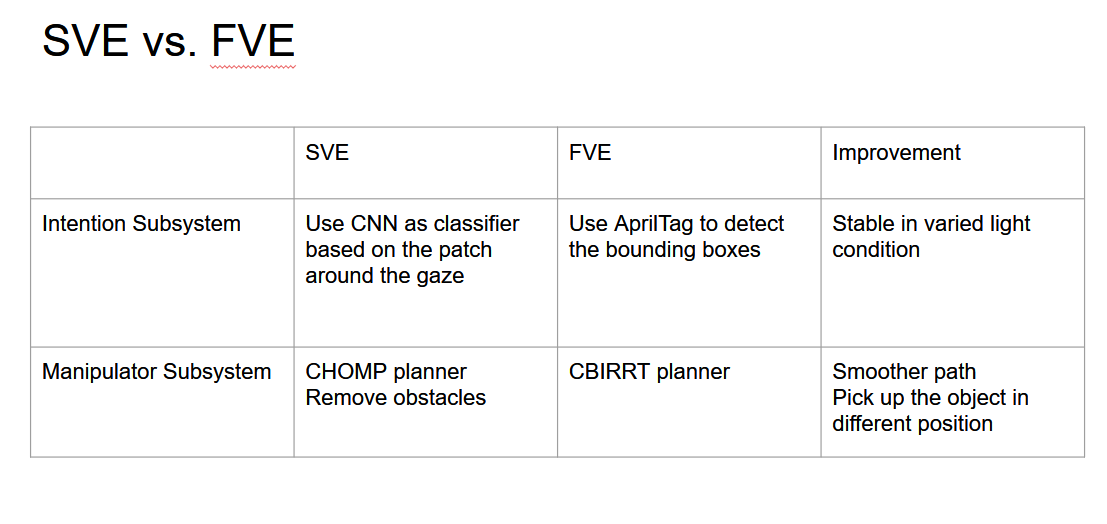
- The system was cognitively less taxing as compared to the System we set up during our FVE. People had complained that they had to stare at the object for too long after giving a command. We, simply by only the use of gaze, could overcome this issue
- The manipulator was able to plan in a cluttered environment unlike before. The planning times that the observers noticed during our validation experiments and our tests throughout show that the planning times reduced to seconds after we implemented our heuristic. This resembles a more real-life scenario where there might be more than one object on the table.