Use Case
War hero, valiant, veteran, Captain Jean Rodgers walks into her favourite Italian restaurant. She is here to meet an old friend from the academy.
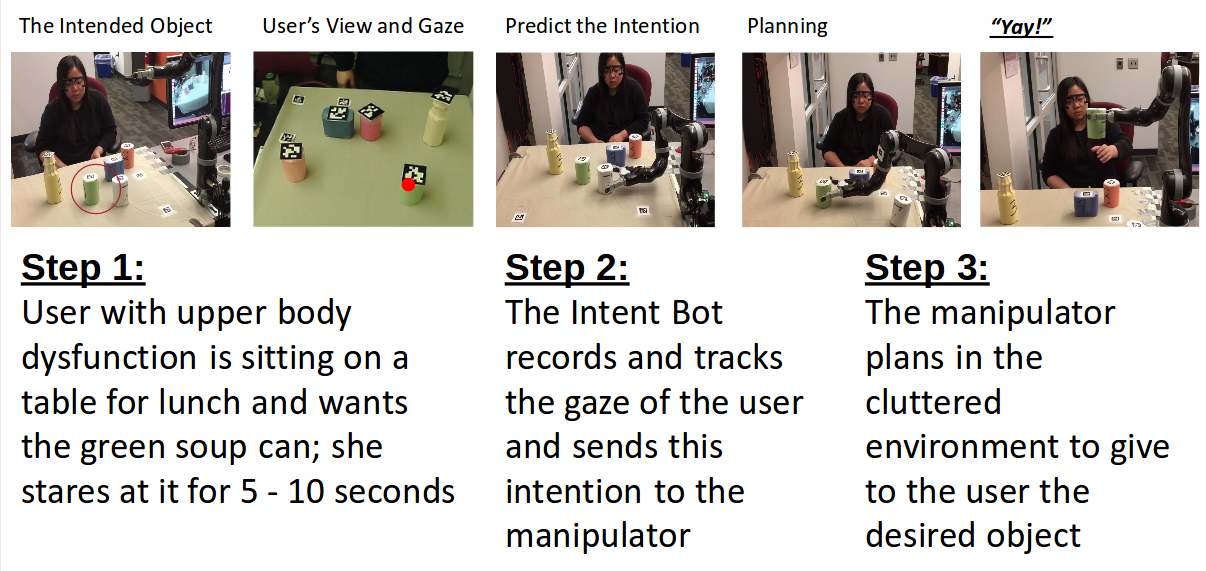
As Jean enters the restaurant, she is greeted by the waiter who escorts her and her friend to a table. When they reach the table, the waiter hands Jean a pair of sleek glasses along with the menu. her friend is curious about the robotic arm along with the depth camera attached to the table top, and about the glasses which Jean holds.
Jean lost the strength and stability in her forearms due to a bullet wound in the War. She explains how the bot in front of them, called the Intent Bot, assists her at manipulating objects. She can gaze at an object, which is lying on the table and which she wants to pick, and at the command of her voice the robotic arm will pick and place it next to her. Her friend is simply baffled at this. Jean demonstrates. First, she wears the pair of glasses which, essentially, track Jean’s pupils. Next, she gazes at the can of soda in front of her, and says, “Pass me that soda-can!” the robotic arm reaches for the soda-can, which weighs about 400 grams and is around one arm-length away, and places it near Jean’s right arm. Her friend is inquisitive. He is surprised about how the robotic arm, despite all the food and the tableware in its way, identified the soda-can, and without dropping it or disturbing any other object, placed it at the exact location where Jean had intended. Although there were many soda-cans on the table, it identified the exact soda-can which Jean intended. As they continue dining, the waiter approaches their table to refill their glasses with water. The Intent Bot was reaching for the can on the table and was about to collide with the waiter when Jean presses with her foot the emergency-stop button. The bot comes to a complete standstill. It is an emergency feature of the robot meant for just this kind of scenario. The waiter resets the manipulator arm and the Intent Bot reactivates.
It is the end of a wonderful evening as they bid each other goodbye. It was an amazing evening and everything that Jean could wish for. Figure below gives an idea about the use case scenario described above.
Requirements
Performance Requirements
- M.P.1: Will recognize the object user’s intent 80% of the time
- M.P.2: Will update the user’s intentions 15 times per second
- M.P.3: Will pick up the intended object 60% of the time in a simple case
- M.P.4: Will pick up the intended object 33% of the time in a complex case
- M.P.4: Will stop with the emergency stop input 100% of the time
- M.P.5: Will be able to pickup and place a Campbell’s soup, a spam can, and a fuze bottle
Performance Requirements – Desirable
- D.P.1: Will recognize the user’s intent correctly 90% of the time
- D.P.2: Will correctly place/bring the object 80% of the time
- D.P.3: Will pick up the intended object 80% of the time
- D.P.4: Will identify and pick up the correct object in a clustered environment where objects are at least 10 cm apart
- D.P.5: Will complete the pick and place task within 1 minute
- D.P.6: Will pick up objects that weigh up to 1 kg
Non-Functional Requirements
- M.N.1 Will be more intuitive to use than the current manual control
- M.N.2 Will cost less than $5000 to develop
- M.N.3 Will be robust to varying lighting conditions
- M.N.4: Will contribute to the HARP Lab Software Stack
- D.N.1 Will function robustly in non-laboratorial condition