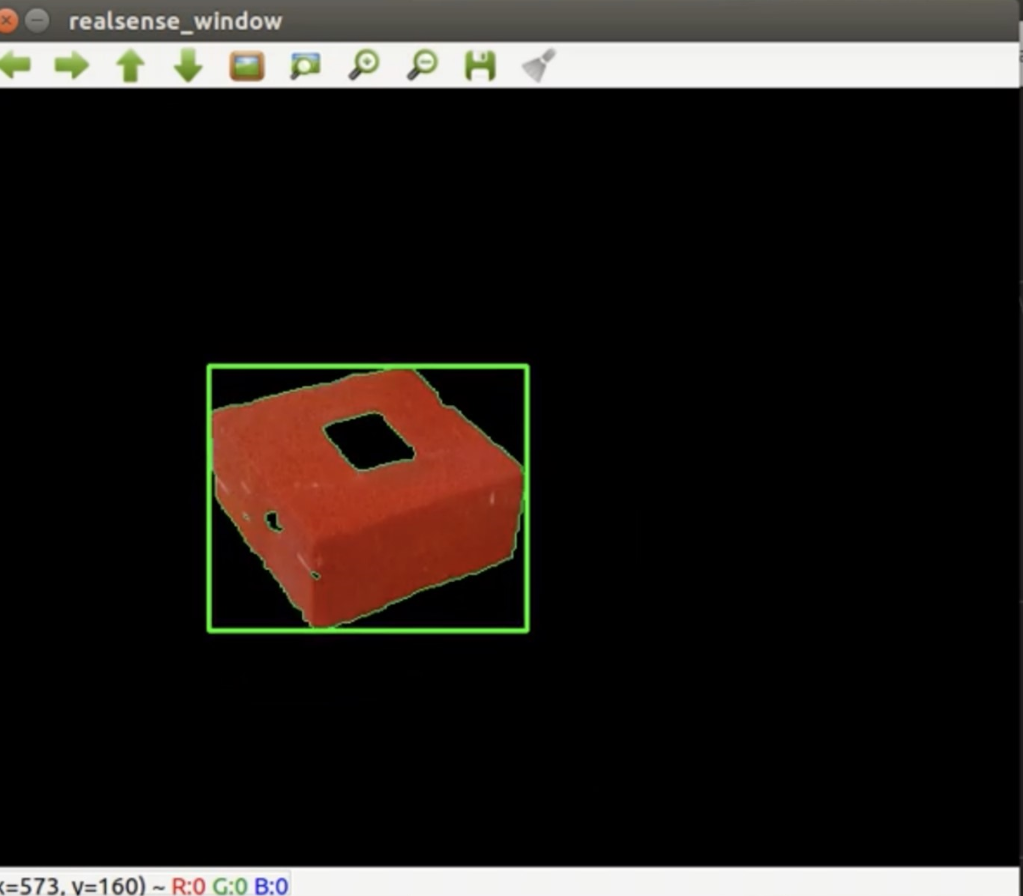
Block Detection with Color Segmentation
Using OpenCV2 libraries, we are able to segment the image in the HSV space to find the block we want.
Then we find the contours inside the segmented image, and find the bounding boxes of the contours.
Then we select the bounding box that fits in the criteria and determine it to be the bounding box of our block.
The main reason we use HSV color segmentation is it is lighting invariant and computationally efficient to compute.
On the other hand, this method is not very discriminative; hence making many false positives. Due to this, we need
to look into other methods that can resolve this issue.