Block Detection with Selective Search
The proposed block detection pipeline is implemented as follows:
1. We collected images of the blocks and fit a logistic regression classifier to the data contain-
ing red blocks, blue blocks and a background class. Some examples of the training set
is shown in the Figure.
2. Given an image of the scene, we run selective search to obtain region proposals in the
image.
3. We then classify every patch using a trained logistic regression model and run non-
maximal suppression to obtain the best bounding box for every block in the scene.

Examples in the training set. The top row represents red blocks (class 1), middle
row represents blue blocks (class 2) and the bottom row represents the back-
ground class (class 0)
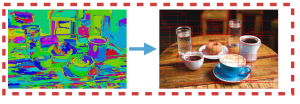
Selective Search
Selective search is a region proposal algorithm that works by grouping hierarchical repre-
sentations of pixels with similar colour, shape, size and texture. It works by first over seg-
menting the image as an initialization and beings grouping adjacent segments based on
the similarity in colour, shape, size and texture.
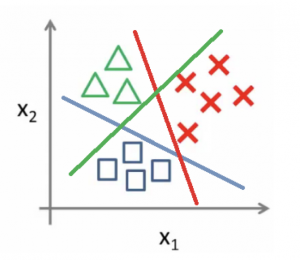
Logistic Regression
Logistic regression fits a linear model to a set of data points. A sigmoid activation func-
tions is applied on the output of the linear model to map the outputs between 0 and 1 to
represent a probability distribution. The model is optimized to minimize the cross entropy
between the predicted distribution and the true distribution given by the labels of the data.
The weights are usually updated using gradient descent since this is a non-linear optimiza-
tion problem.