Manipulator
In order to pick up a block with our drone, a manipulator is required. It is mounted at the base of the drone and uses a magnet to pick up the blocks. The figure below shows the designed manipulator.
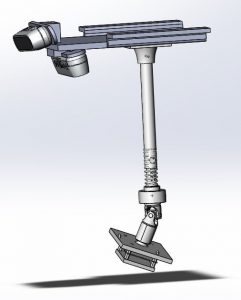
It has the following features:
- A linear up and down motion of 4cm is possible due to a slotted shaft. This motion is damped by a spring between the upper part of the shaft and a shaft color at the bottom of the shaft
- A 2 DoF U joint is attached to the bottom of the plate. This ensures that base of the manipulator can rotate and attach to blocks that are not perfectly parallel to the drone.
- The magnet at the at the bottom of manipulator is a permanent electro magnet. It only requires current to turn on/off and not continuous current like typical electro magnets
- Springs between the base plate and the shaft color (not shown in the drawing) ensure that the U-joint moves into its original position.
Furthermore, two mounts for two Realsenses d435 were designed. One is facing downward to localize the block beneath, the other one faces forward to detect other blocks ahead of the drone. The mounts can easily be 3D printed to modify the tilt angle.