
Progress Review 2
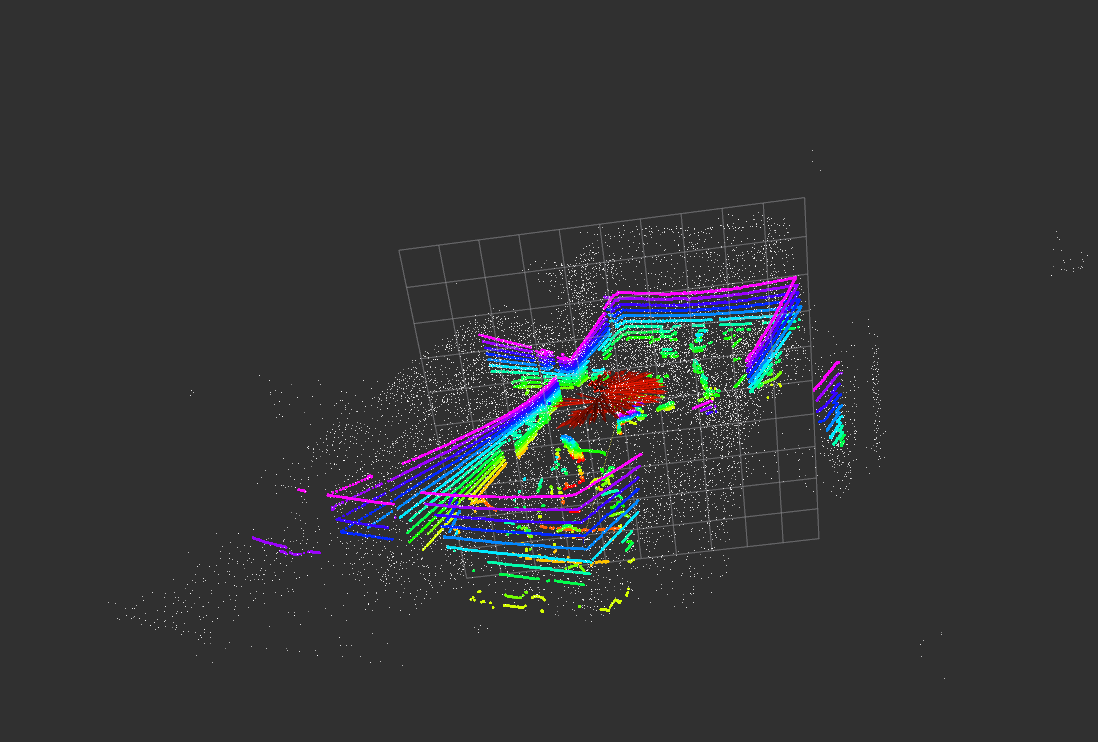
3D Mapping using LOAM algorithm (Lidar Odometry and Mapping)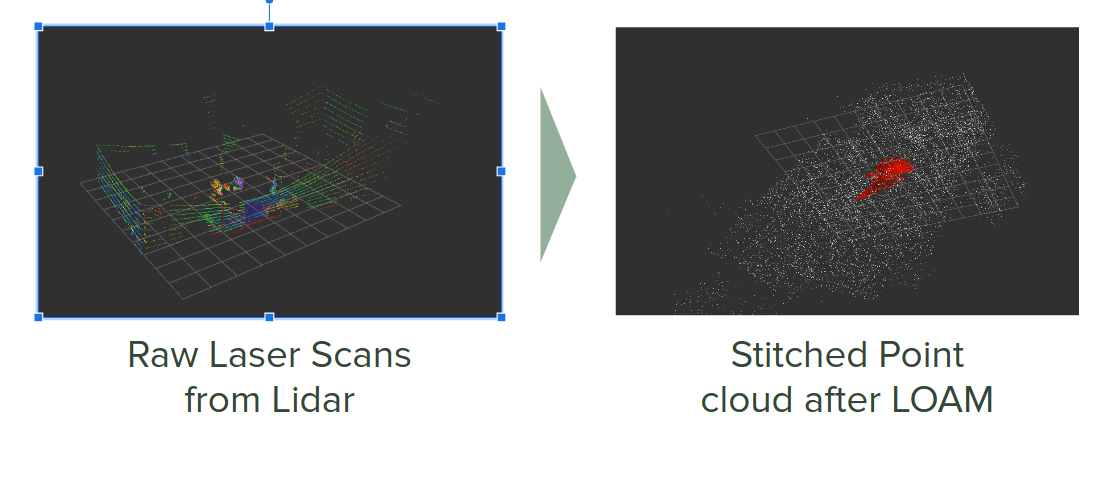
Particle Filter Measurement Model performance analysis 
We started with a navigation architecture that relied on doing lidar SLAM of the farm to generate a dense pointcloud map, and deriving a sensor model from that using a gaussian mixture model. We found this particle filter unstable and ultimately abandoned it for a simpler approach.
Progress Review 3 and 4
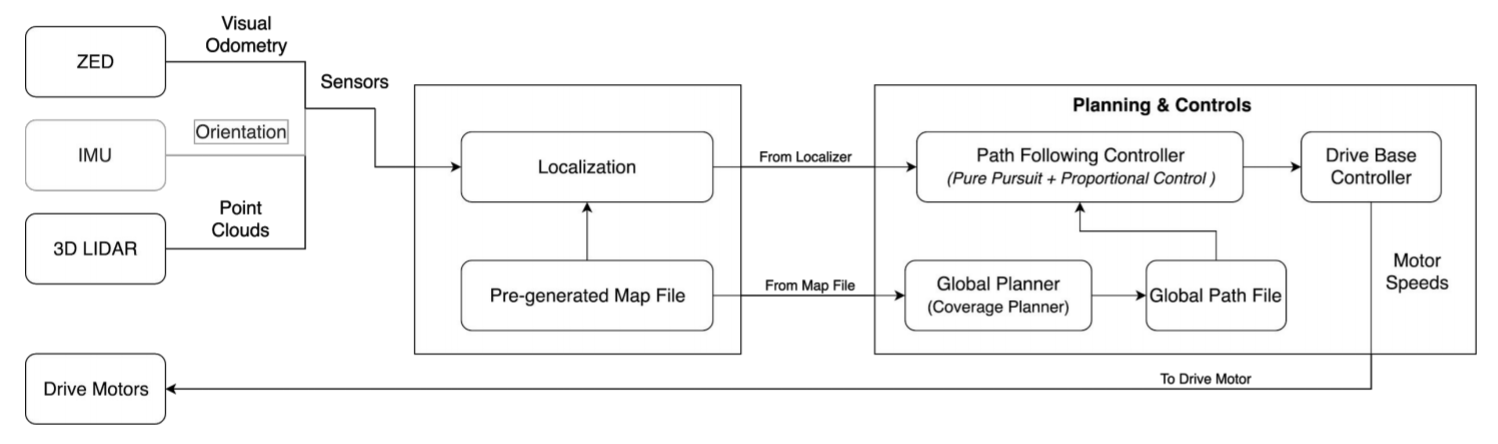
Navigation System Architecture 
Graphical representation of mapping and planning 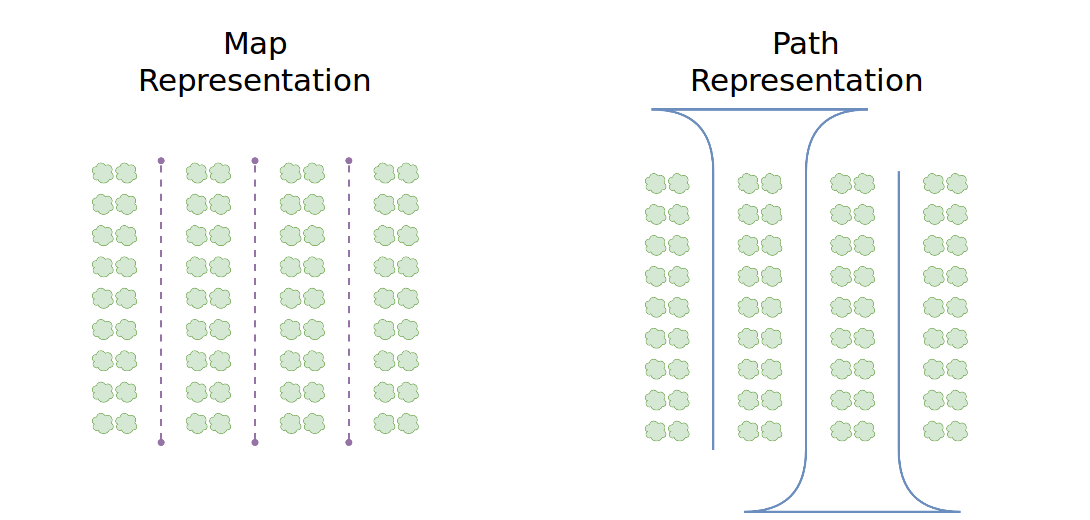
We planned a simpler navigation system which would rely on a pre-defined “map” of row lines and would use row detections of those row lines to localize within the field.
Progress Reviews 5 & 6 (SVD & SVD Encore)
We converged on a navigation strategy for SVD which relied on fusing visual odometry and row detections with a particle filter. We were able to achieve our SVD goals with this approach.
Progress Review 7
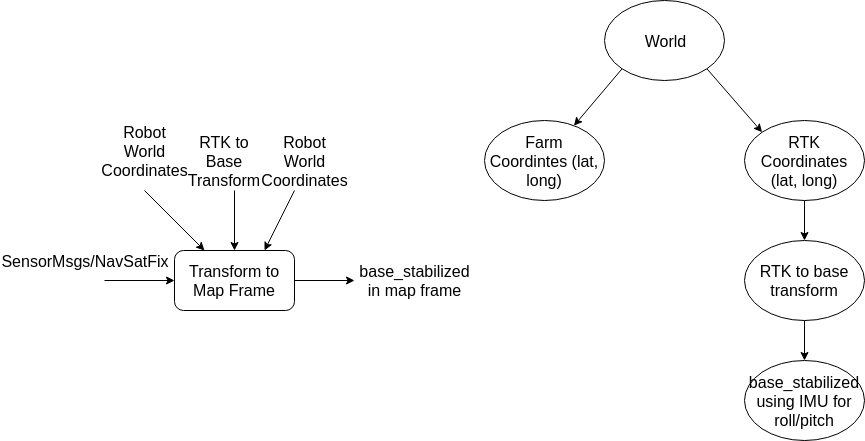
Our spring field testing with real plants at Rivendale was not promising. In order to de-risk, we implemented an RTK based localization system in Fall 2019. This system unfortunately suffered from poor yaw estimation from our magetometer, leading to poor roll correction and ultimately poor localization.
Progress Review 8
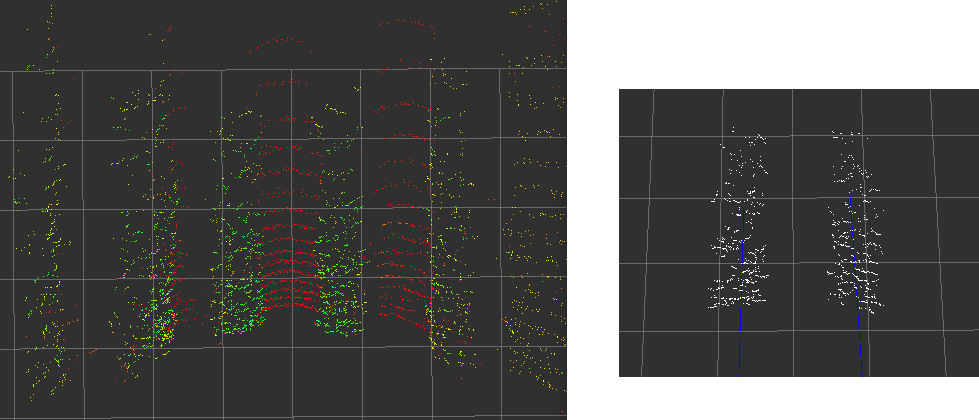
With a new weed suppression net installed on the field, and challenges faced with RTK localization, we re-visited lidar row segmentation based localization and concluded our previous lidar segmentation + particle filter approach was plausible.