Controller
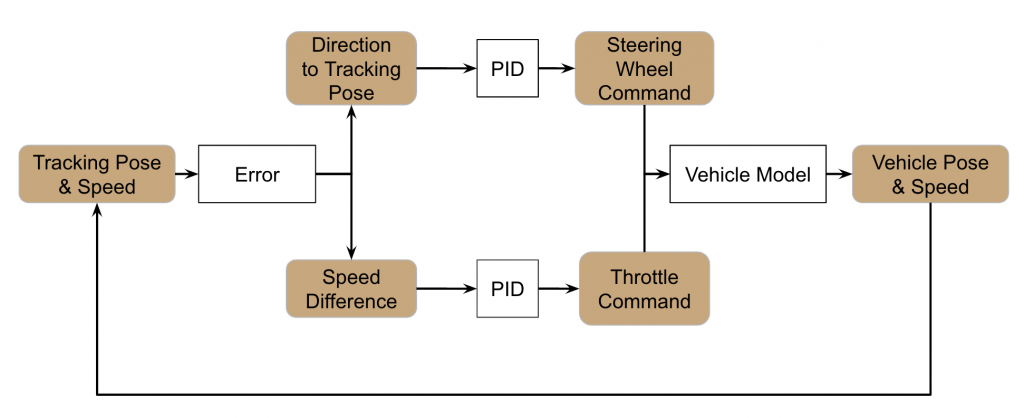
Controller Schematic
We are using PID controllers to control the movement of the ego-vehicle. We use two PID controllers in our system:
- Lateral PID Controller: This is used to control the desired steering angle of the ego-vehicle.
- Longitudinal PID Controller: This is used to control the speed of the ego-vehicle
The controller takes in the current position, orientation and speed of the ego-vehicle as information from the simulation subsystem, and the desired position, orientation and speed from the path-planning subsystem.
The latitudinal controller has Kp = 1, Kd = 0.01 and Ki = 0.01. The longitudinal controller has Kp = 0.5, Kd = 0.05, Ki = 0