Issues log
Sl No Date Found Date Resolved Owner Origin Description Resolution Artifacts Changed 1 03/01/2020 03/25/2020 Kartik RL Node Integration...
Sl No Date Found Date Resolved Owner Origin Description Resolution Artifacts Changed 1 03/01/2020 03/25/2020 Kartik RL Node Integration...
Spring Validation Demo Spring Validation Demo-1 Objective To show that the system can perform successful lane changes in straight roads. ...
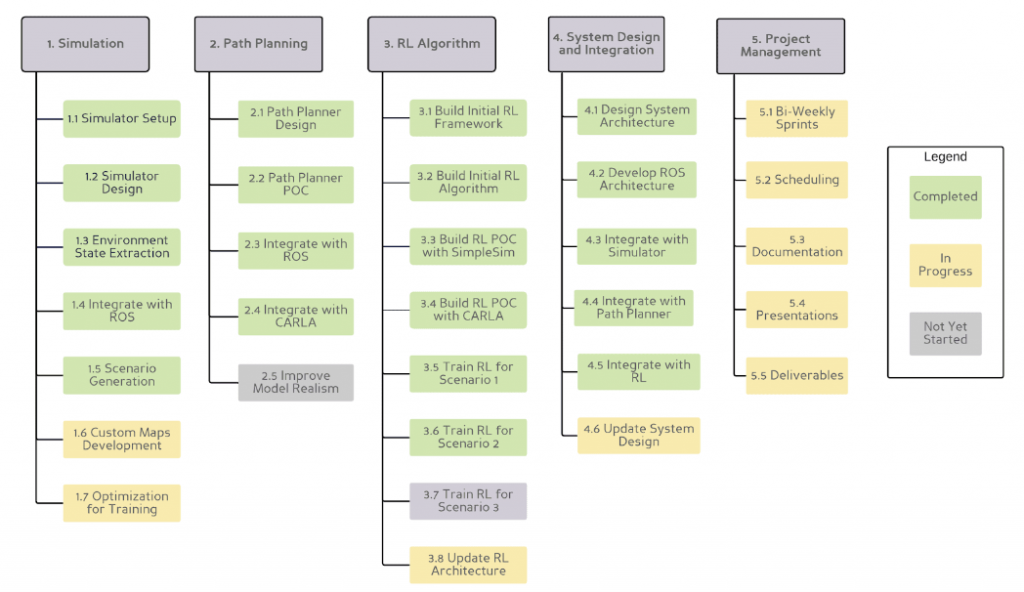
Fall 2020 Milestones Based on our observations in the spring, we chose to keep our milestones in sync with the...

The system will… M.P.1. Complete a successful point-to-point navigation by stopping within 2 meters of the goal pose M.P.2. Perform...
The system will… NFR1. Have one or more reinforcement learning agents NFR2. Be learning, training, and working in simulation
The system shall… M.F.1. Perform point-to-point navigation on the roads within a geographical region that Has the presence of other...

The system needs to simulate the environment and external agent behaviors realistically. Thisis an important requirement if the system needs...
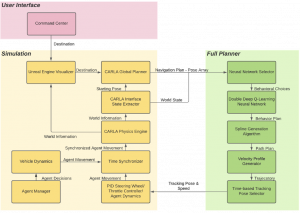
Shown here in the above figure, is the cyber-physical architecture for our project. It shows a system capable of performing...
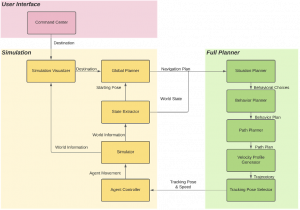
The diagram above illustrates the functional architecture of our project. The architecture is designed to achieve point-to-point navigation with our...