We will be having timely reviews according to the MRSD program schedule. Below is the list of presenters for each of those reviews.
| Sr. No | Presentation | Presenter | Date |
|---|---|---|---|
| 2 | Progress review 1 | Justin Morris | Feb 19 |
| 3 | Progress review 2 | Alex Withers | March 4 |
| 4 | Progress review 3 | Awadhut Thube | March 25 |
| 5 | Progress review 4 | Justin Morris | April 8 |
| SVD / Progress review 5 | All Members | April 22 | |
| 6 | SVD Encore / Progress review 6 | All Members | April 29 |
| 7 | Progress review 7 | Alex Withers | September 16 |
| 8 | Progress review 8 | Awadhut Thube | September 30 |
| 9 | Progress review 9 | Justin Morris | October 14 |
| 10 | Progress review 10 | Alex Withers | October 28 |
| 11 | Progress review 11 | Awadhut Thube | November 11 |
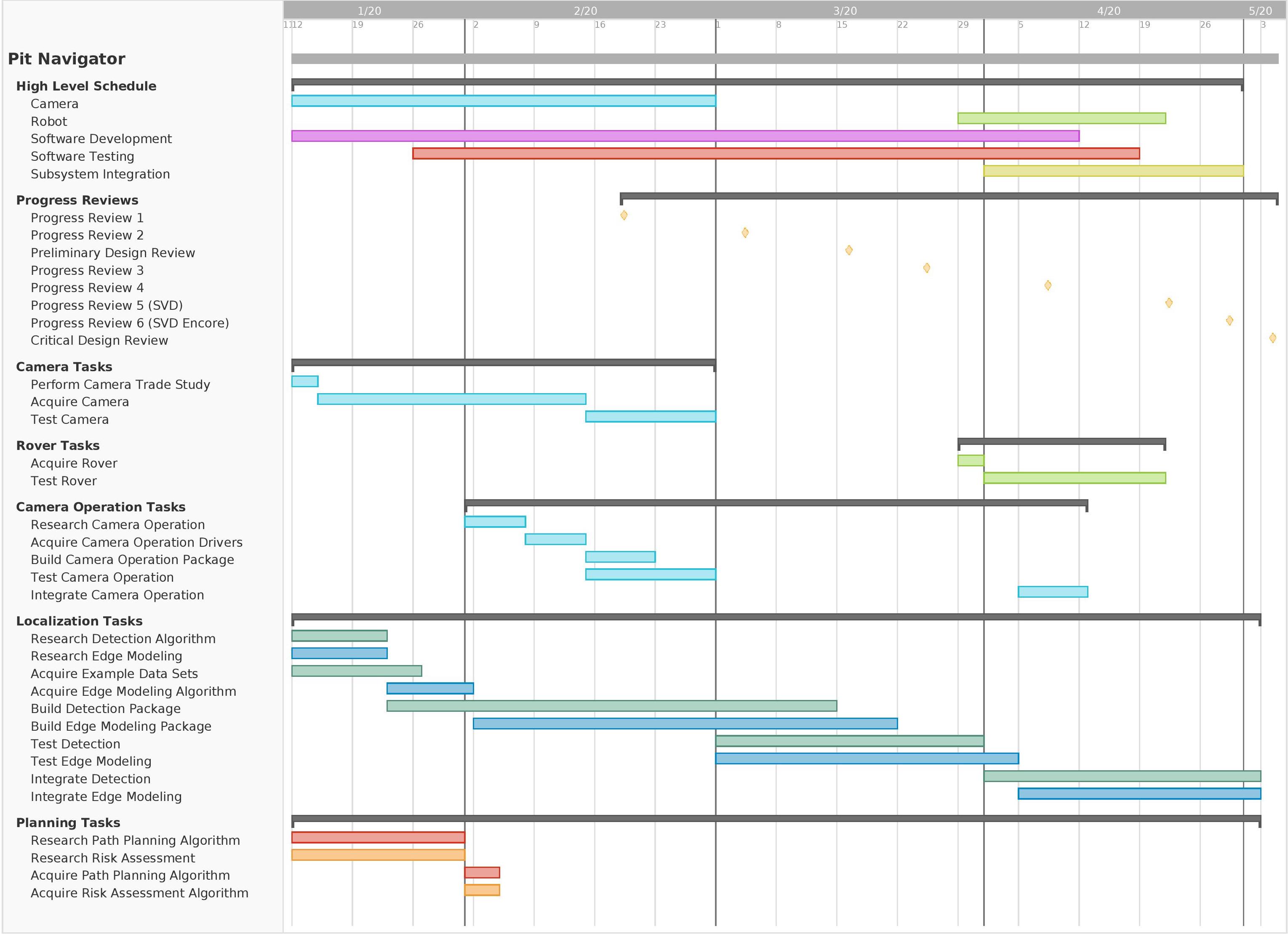
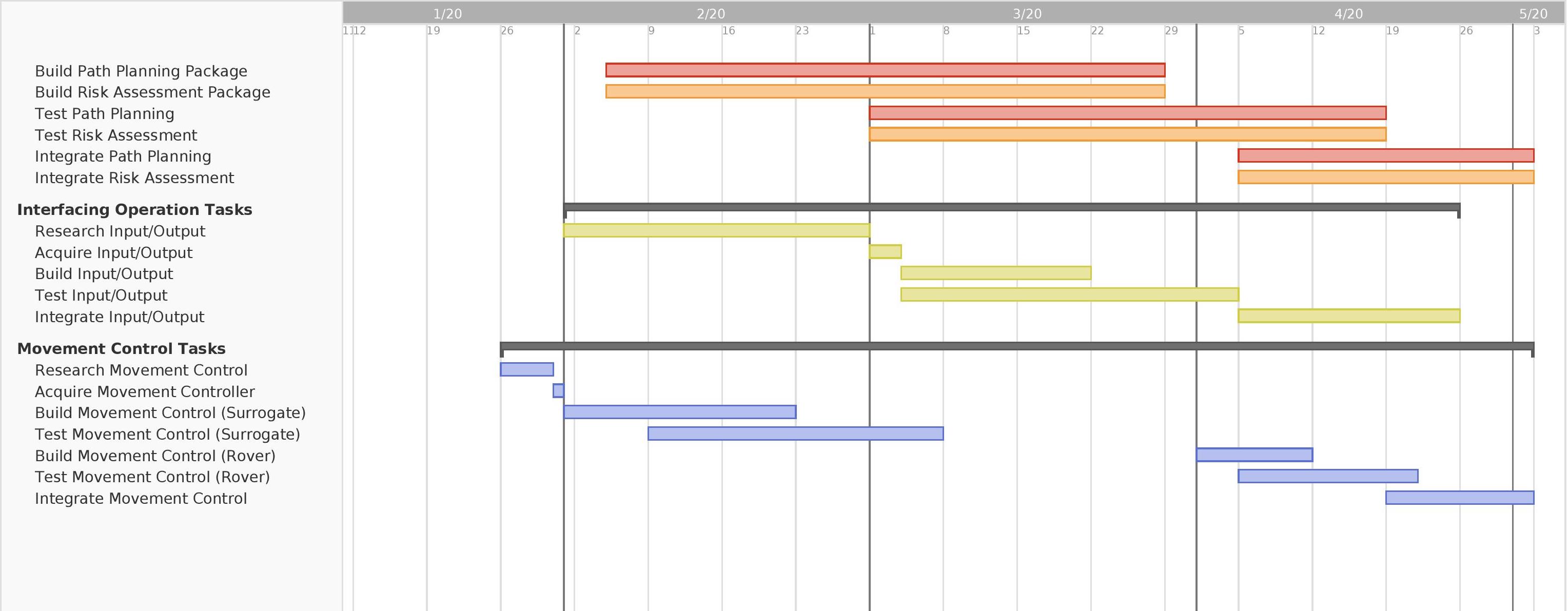
Gantt Chart
The only milestone for Spring 2020 that was not met was the incorporation of brinkmanship into the simulator. The chief obstacle to implementing this feature is the question of how to translate the simulator environment into a point cloud that mimics what could be generated from the stereo cameras on the rover. While it is possible that some work can be done to achieve this milestone over the summer, given that one team member will be working on simulating the Pit Ranger mission as part of his summer internship, the schedule for Fall 2020 makes the assumption that room will need to be made for that work during the first months of the semester.
Much of the other work scheduled for the first half of the fall semester will also take place in simulation, both because this is a logical progression for the project and because of the restrictions imposed by the possibility of continued campus lockdown. The first priorities for Fall 2020 will involve designing more complex robot behaviors in response to brinkmanship edge detection and incorporating a risk assessment component into the planning algorithm. Work will also be done to increase the sophistication of the pit edge detection heuristic, relying largely on data collected during previous tests in the spring. Shown below is a high level schedule for Fall 2020.
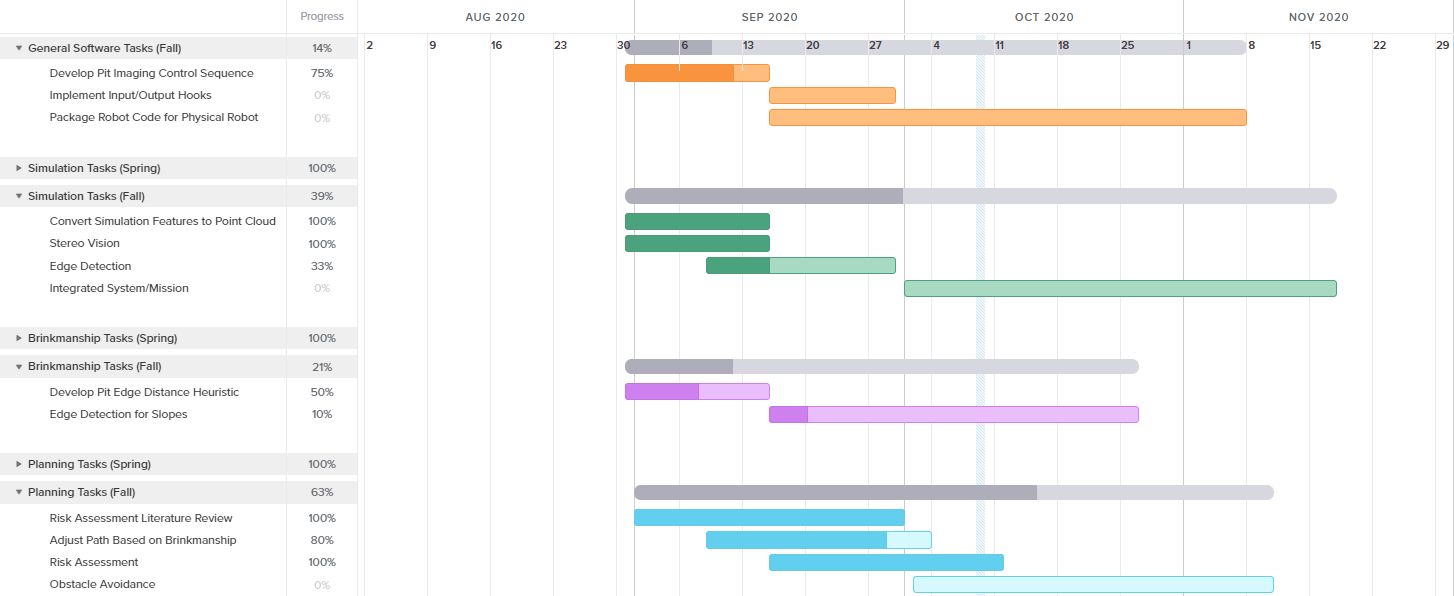
Fig: Schedule for Fall 2020