a. Fall and Spring videos
Spring Semester
Full System Demonstration
Obstacle-less Package Delivery
Above shown is a video of the UAV performing autonomous navigation to the goal position while avoiding obstacles. The UAV can detect an obstacle from a distance of 3m and it maintains a distance of 0.5m from the obstacle at all time.
Manual Package dropoff
Guided A to B Navigation
The takeoff is performed manually and when in the air, the mode is switched to ‘Guided’. The UAV then moves to a position 4m ahead and holds position. Mode is switched back to manual and landed.
Quick demonstration of the Navigation Stack Progress in Simulation. The UAV moves in a lawn-mover search pattern while avoiding obstacles. The black spots shown in the video show the surroundings as seen by the LIDAR. When an obstacles comes more than 1m near the UAV the planner changes UAV’s trajectory to avoid the obstacle,
Fall Semester
Fall Semester Playlist
b. Picture gallery
-

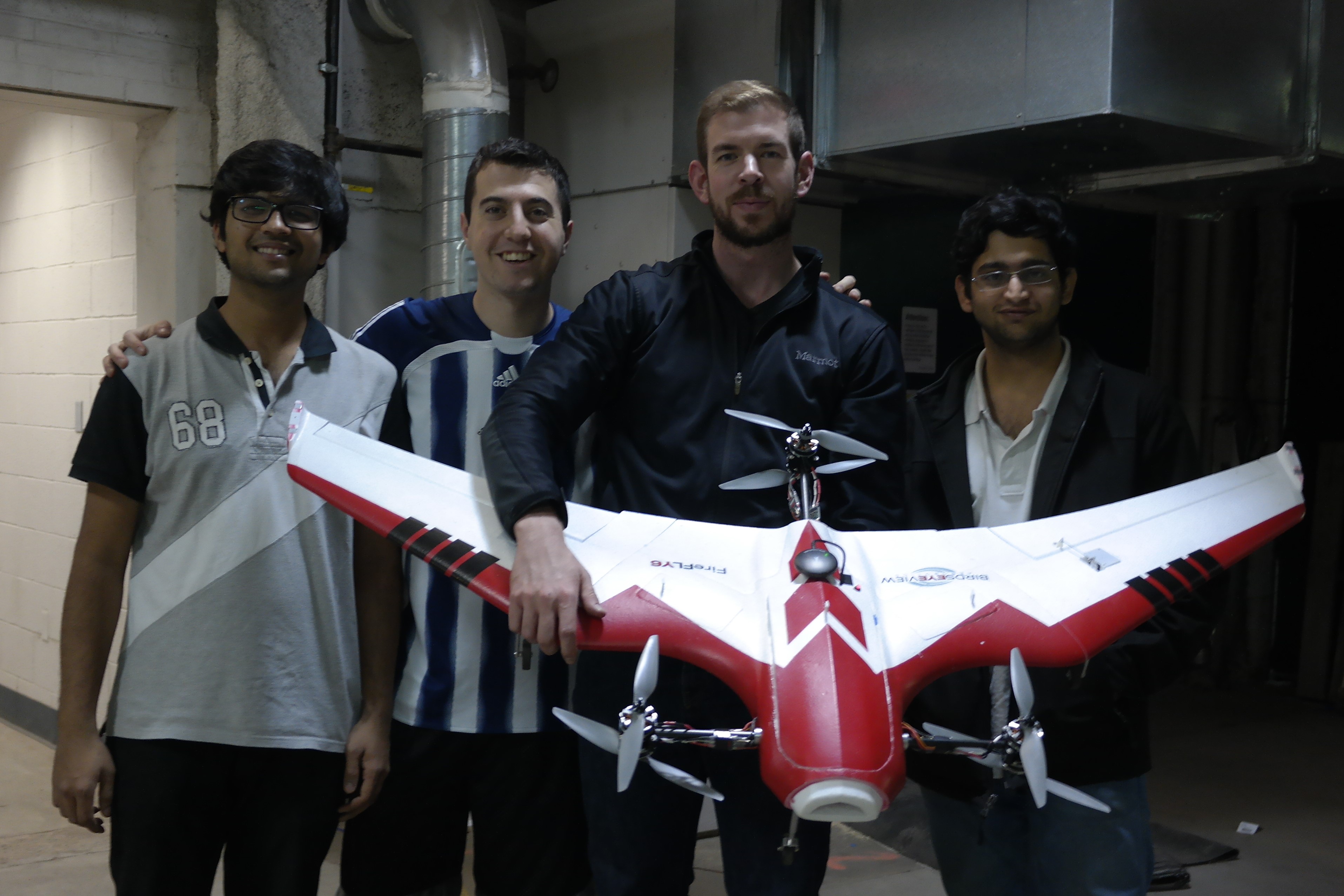
- Team Avengers
-

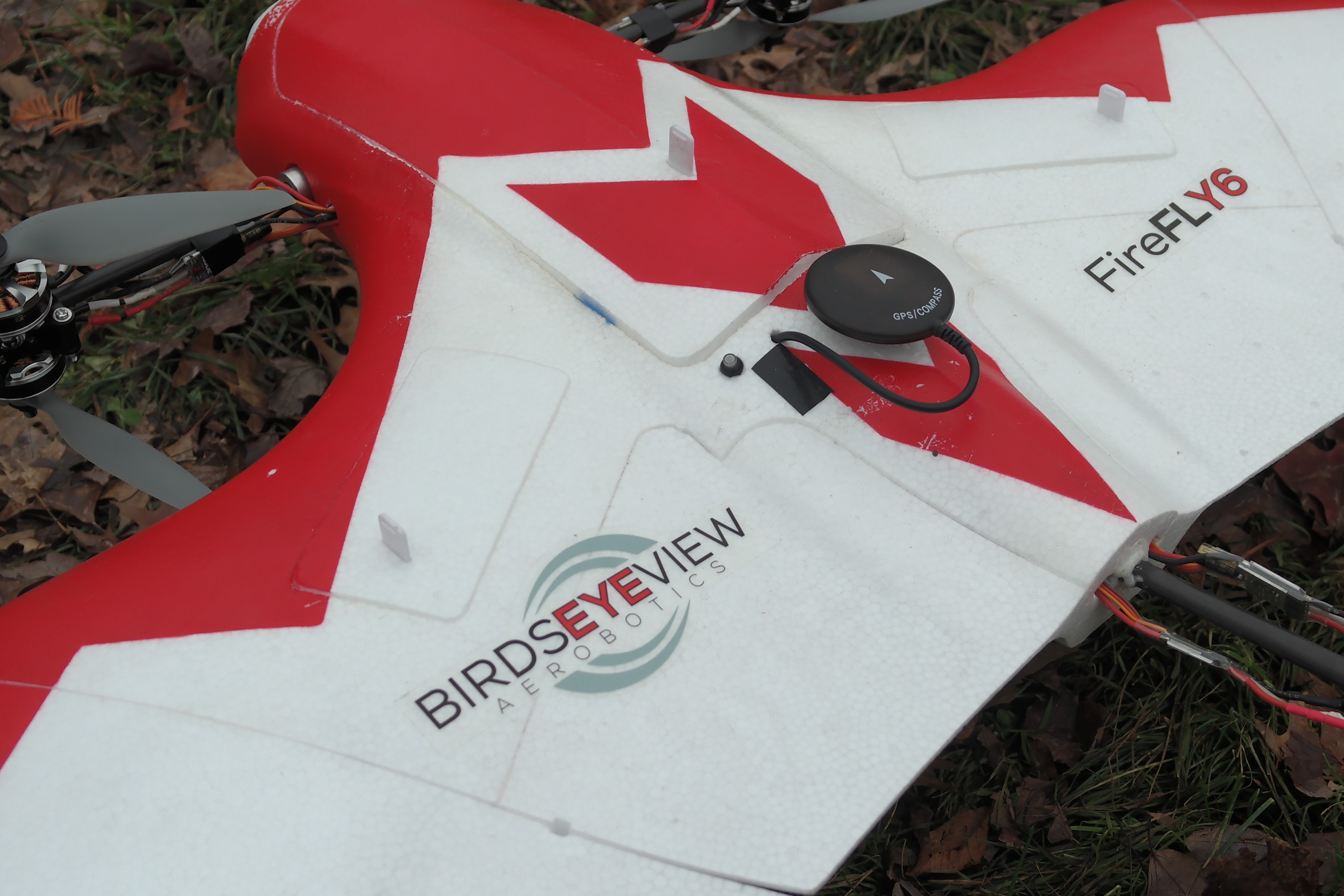
- FireFLY6 Frame

-

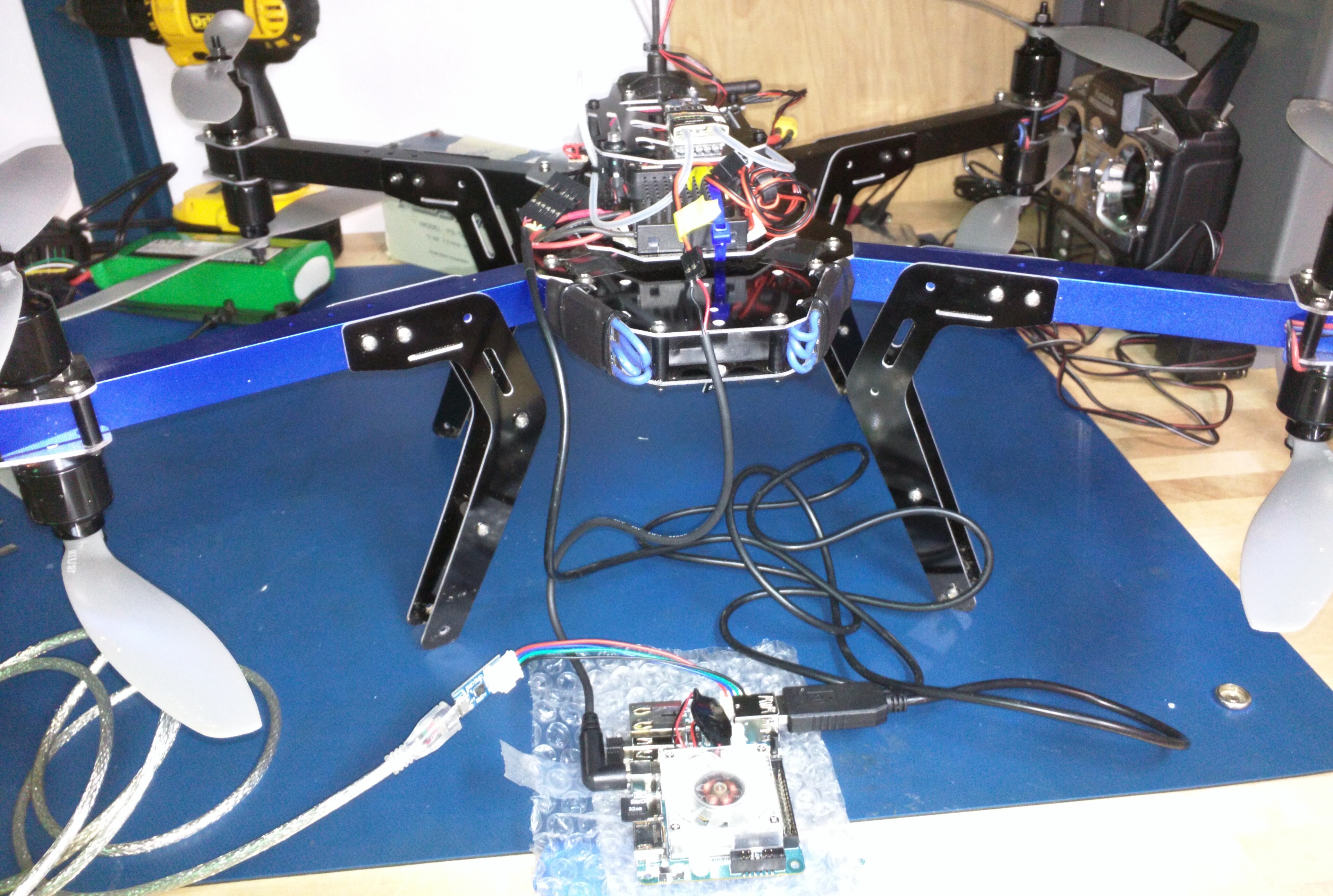
- Flight Controller connected to Flight Planner

-

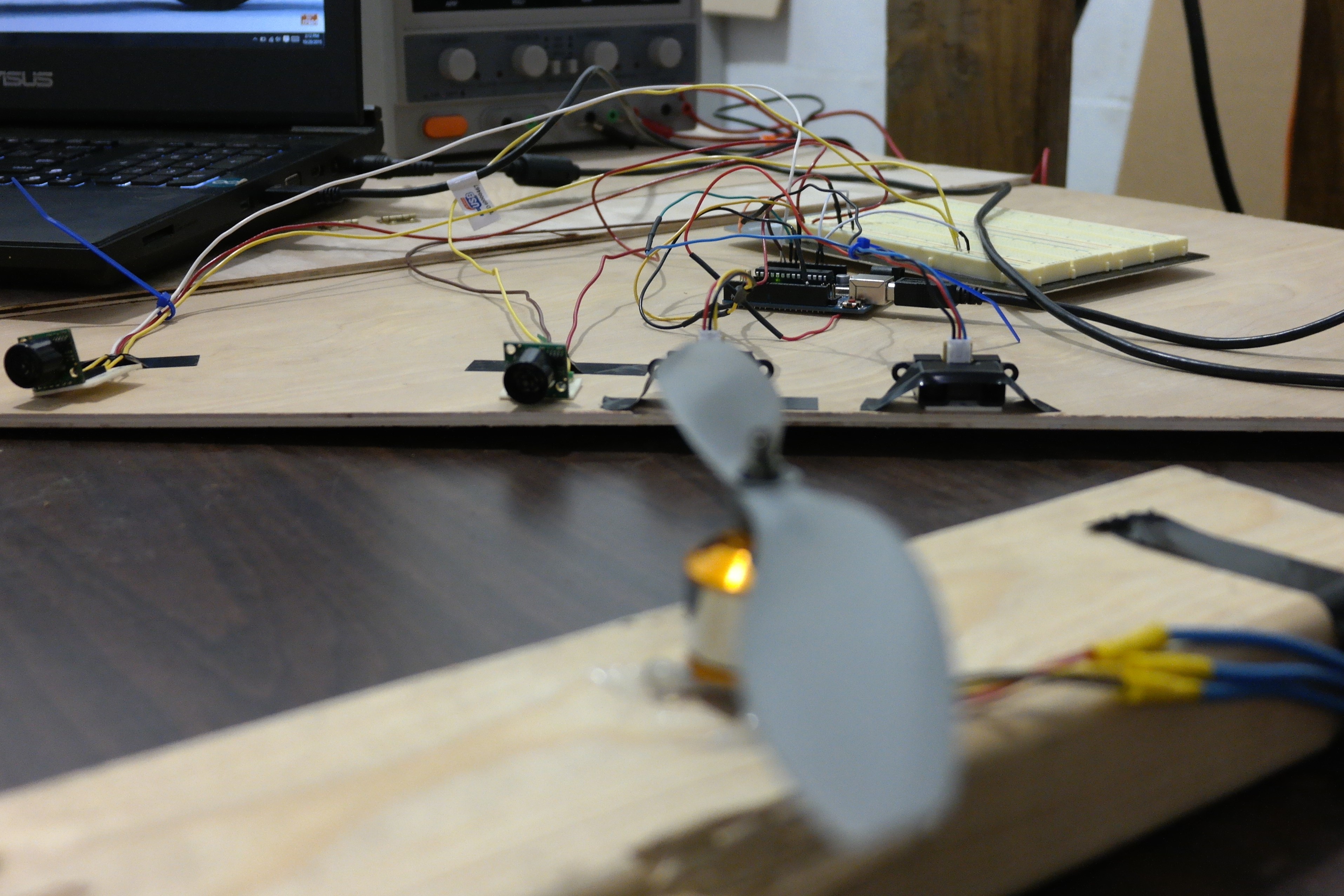
- Test for Interference between Ultrasounds and Motor
-
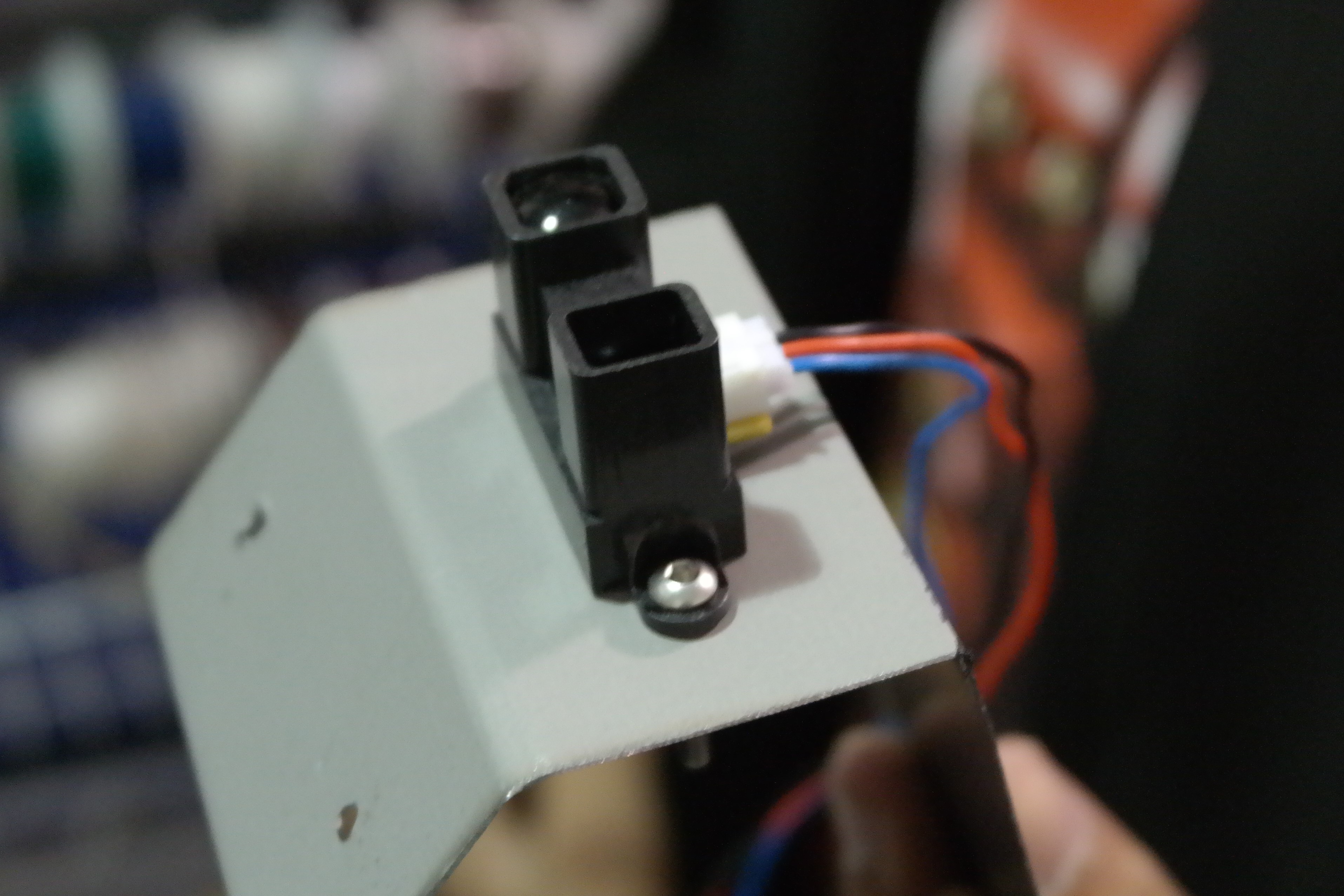
- IR Sensor Mounted On Test Bracket
-

- Sensor Test Mock-Up

-

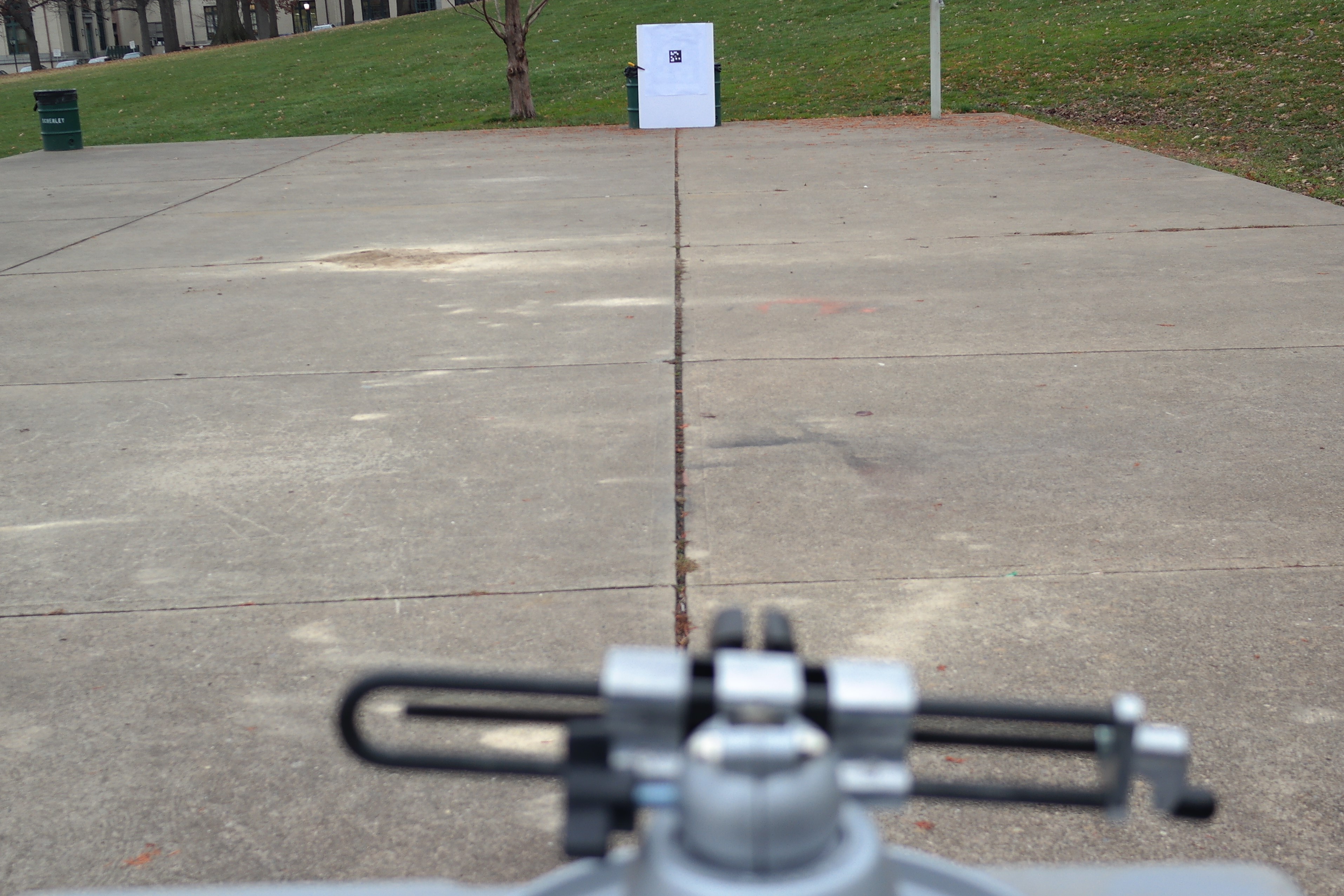
- AprilTag at Range
-

- FireFLY6 at FVE
-

- Drone Calibration

-

- Pioneer 2 during Rebuild
-

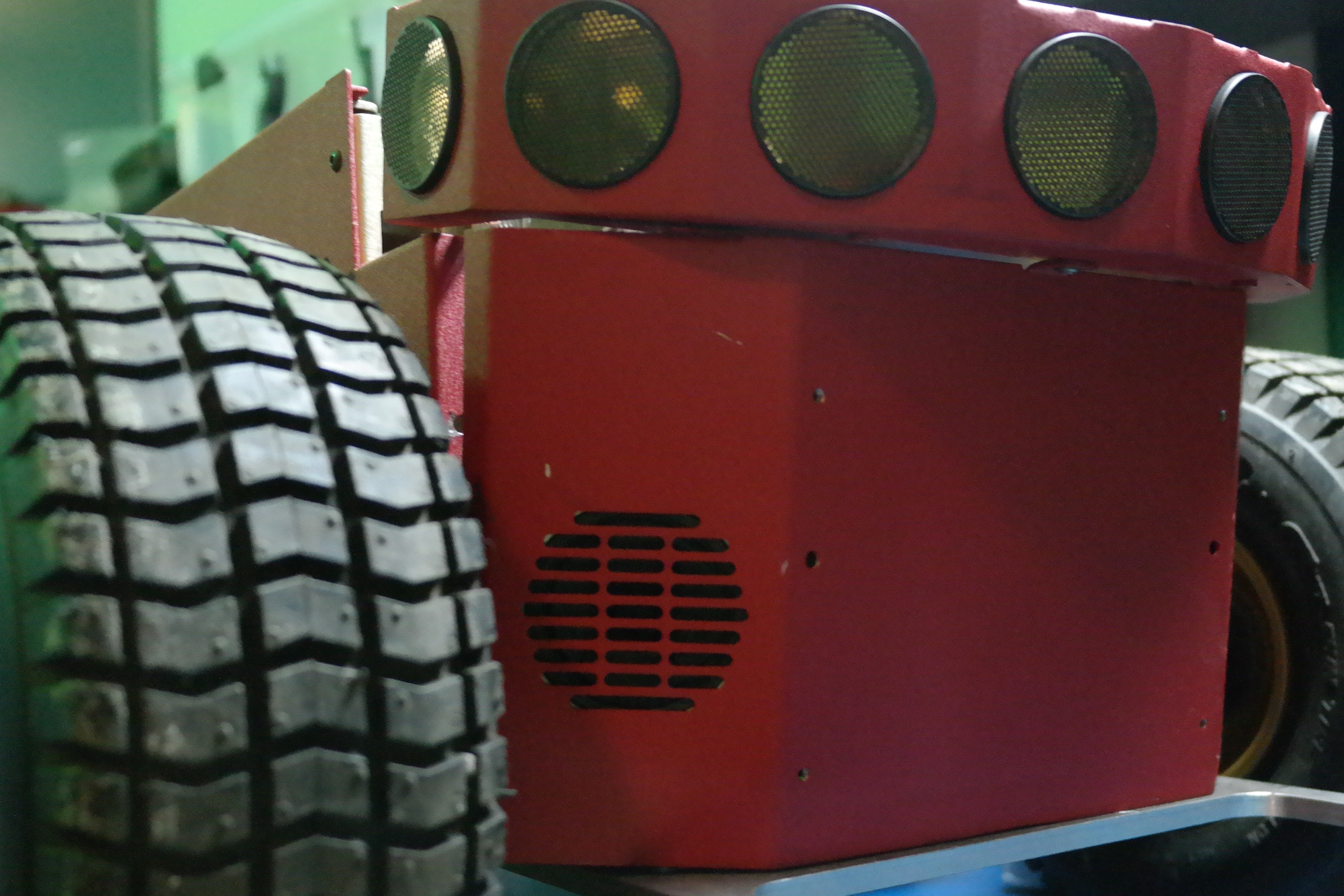
- Sensor Array Test
-

- Obstacle Detection Visualization
-

- Test Computer Vision Markers

-

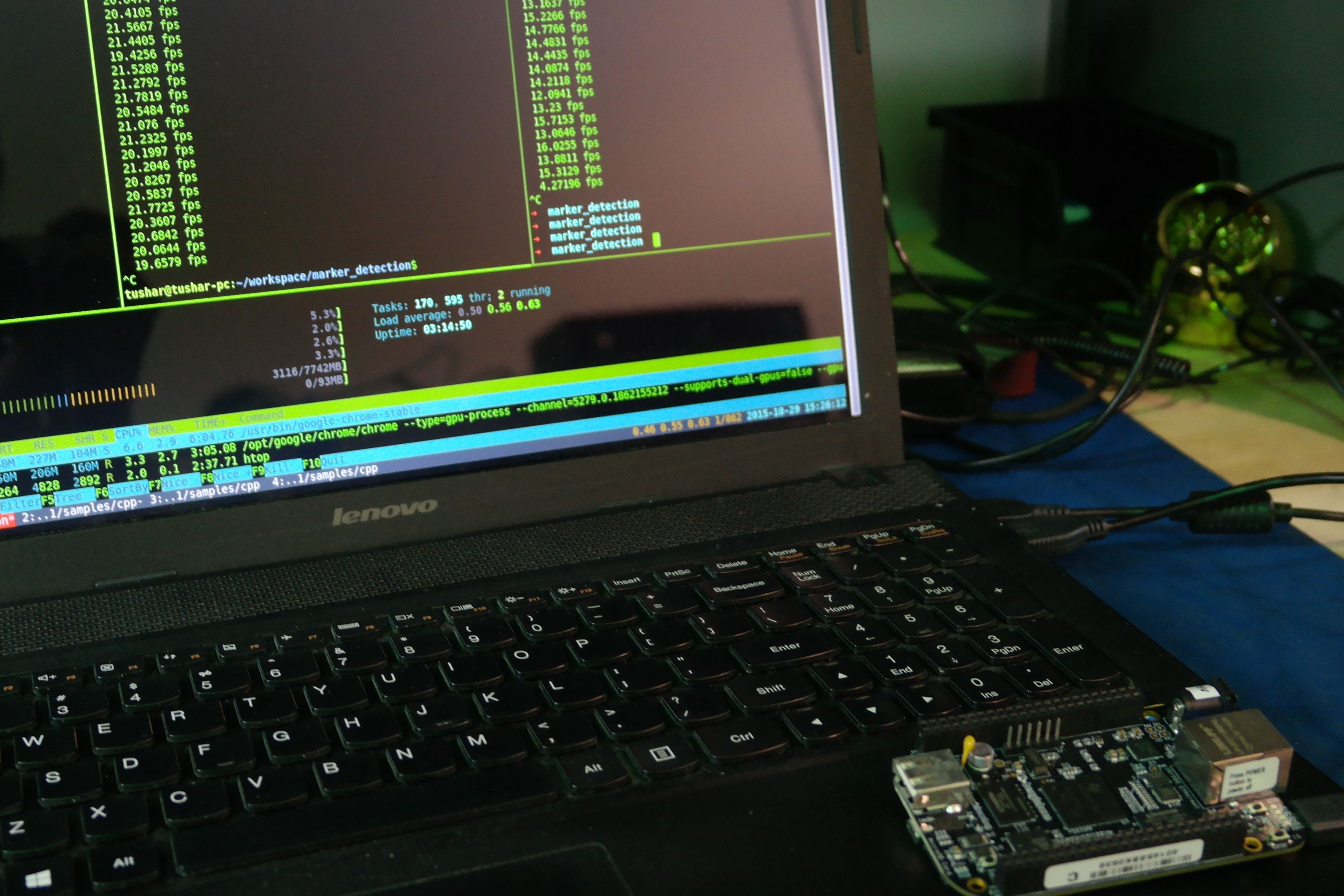
- Initial Vision System Test
-

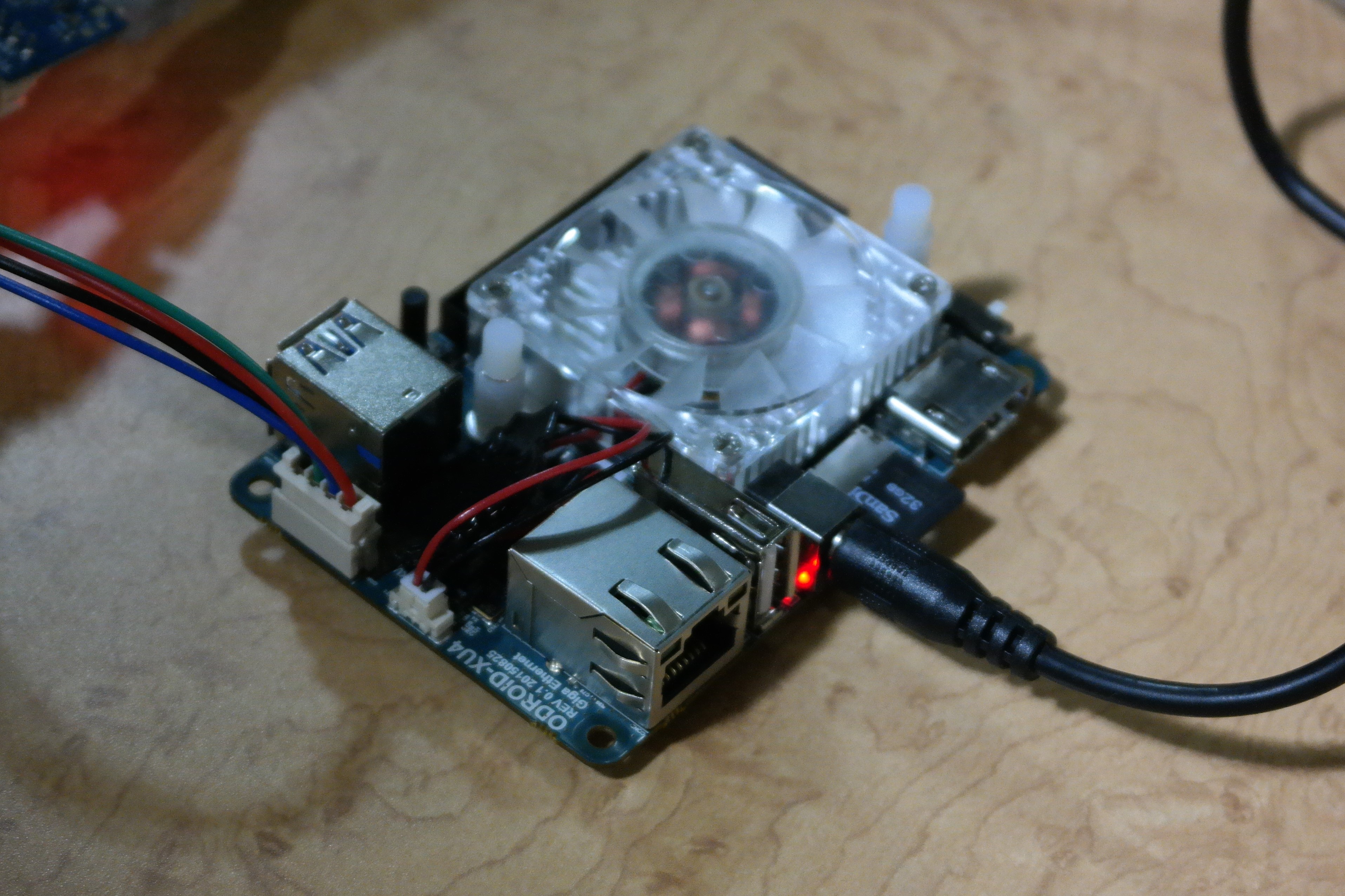
- Odroid XU4
-

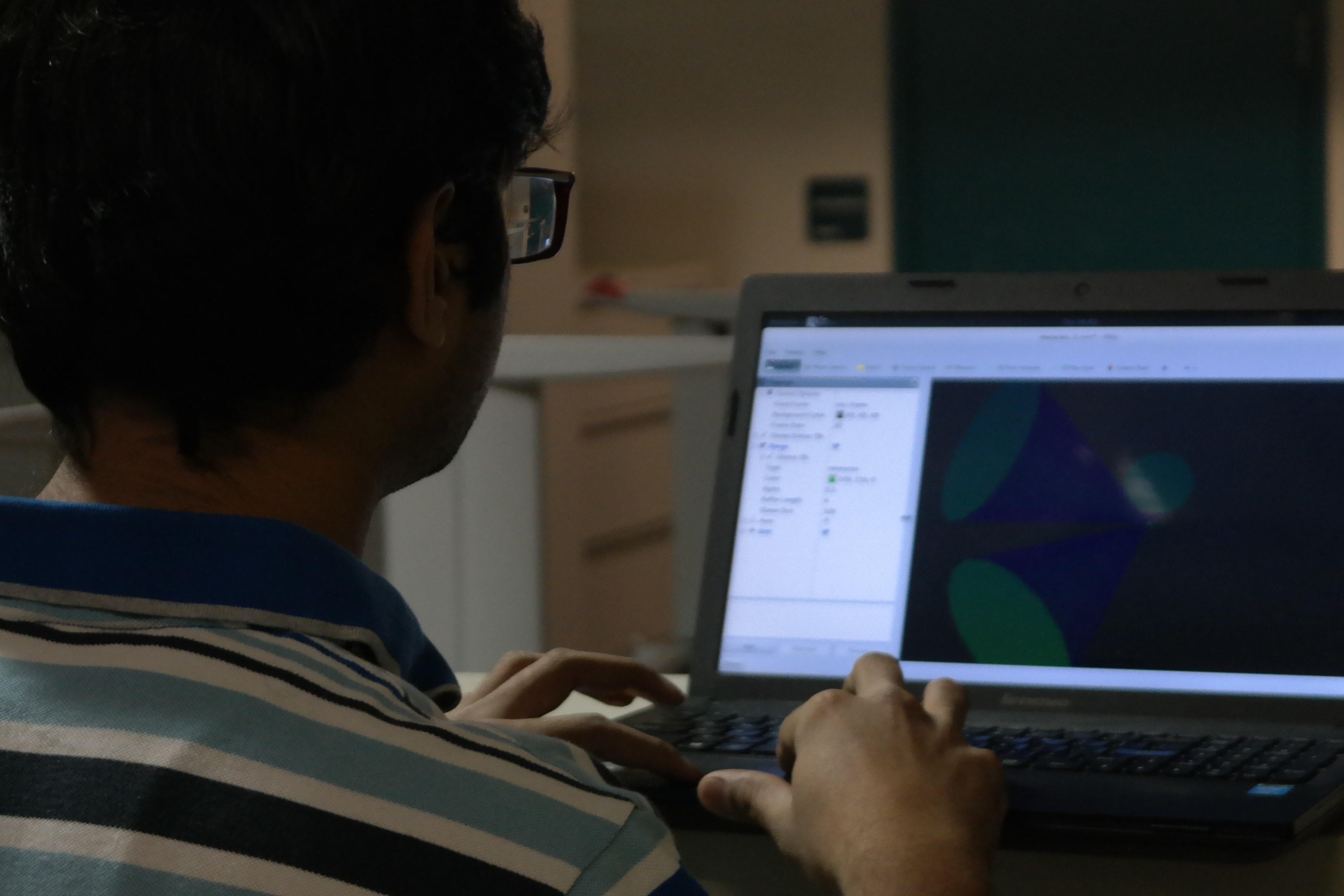
- Vision System Testing
-

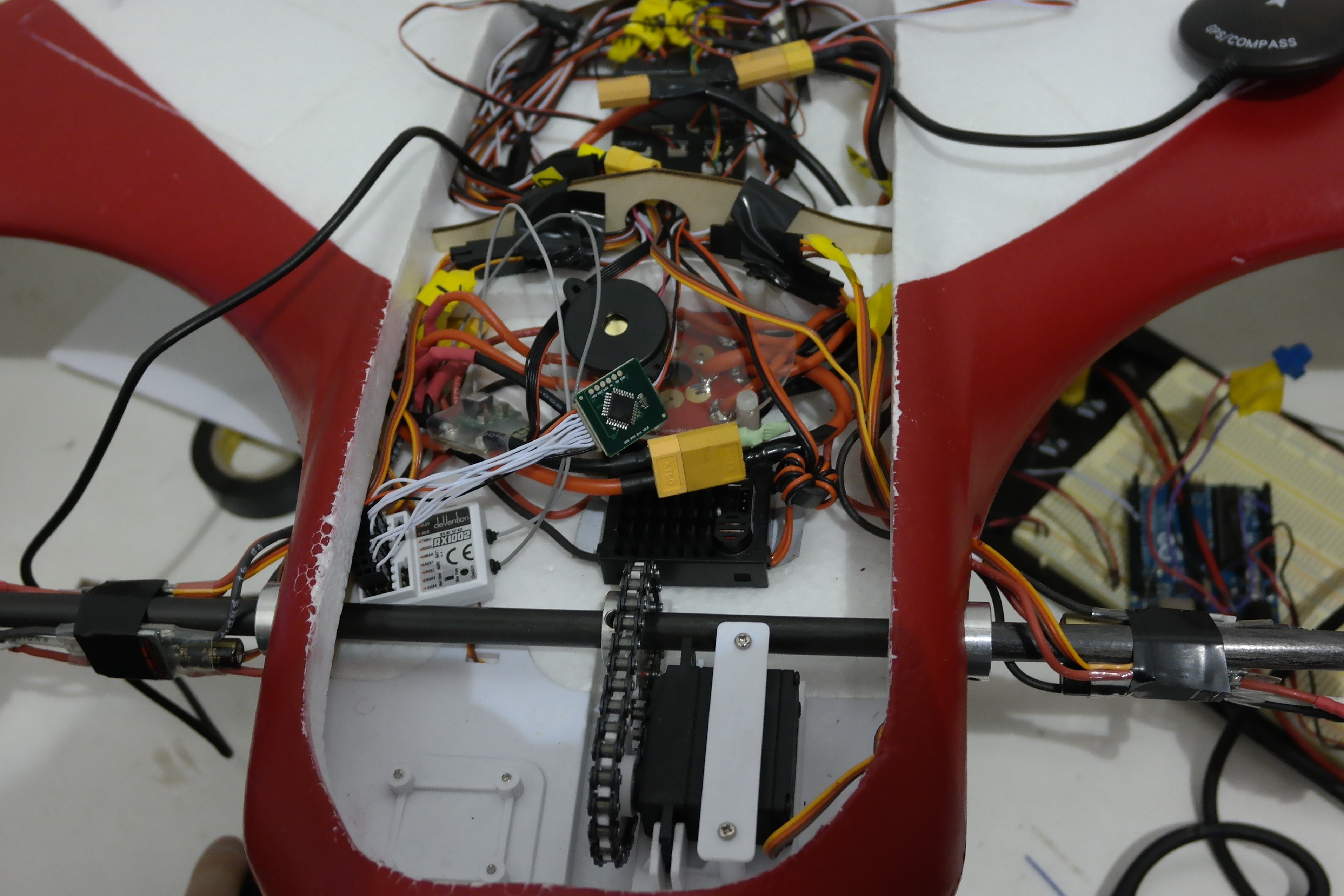
- Electronics Installed in UAV
-

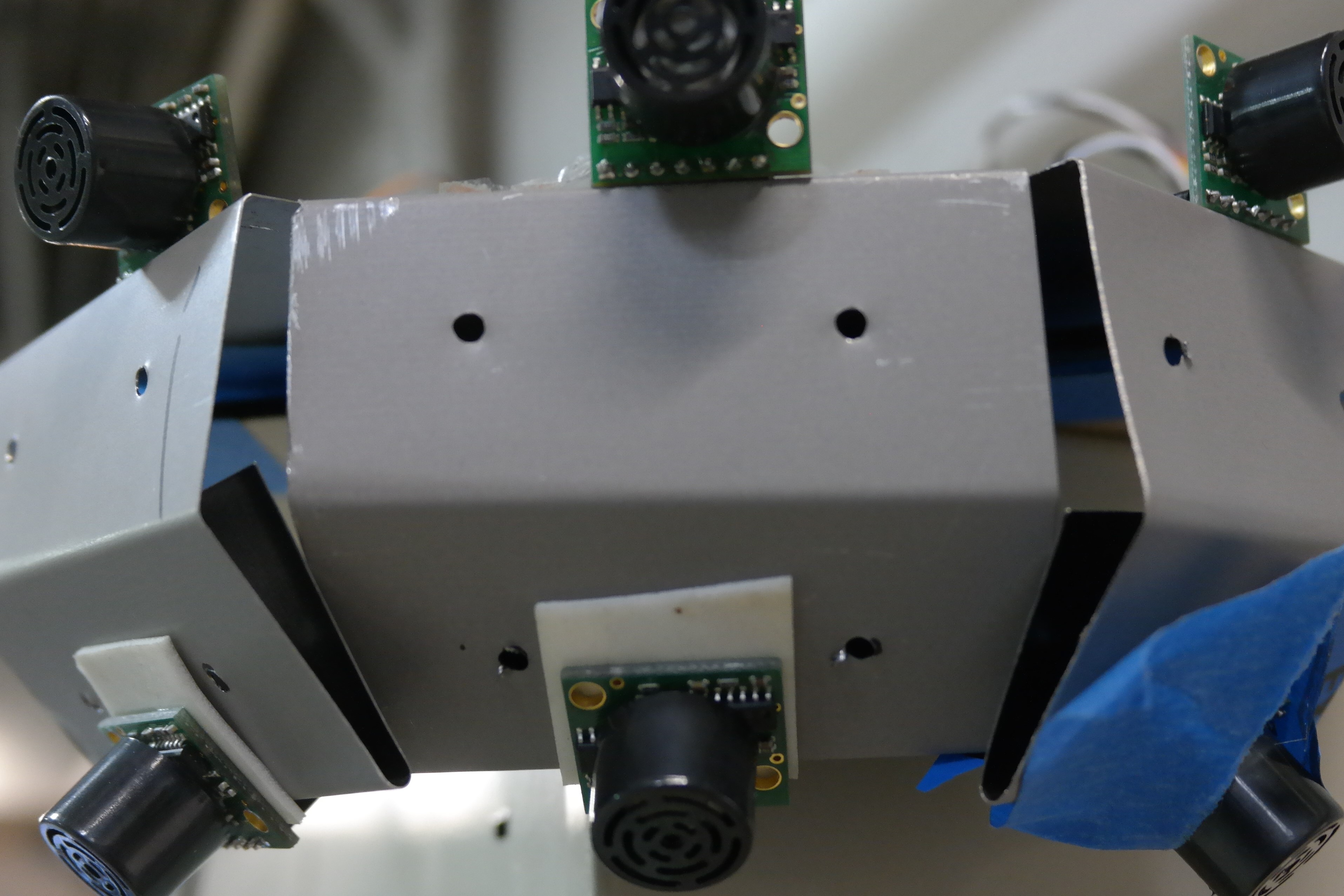
- Close Up of 6 Ultrasonic Sensors Mounted at the Nose of UAV

-

- Measuring Obstacle Detection Accuracy
-

- Professors and TAs Supervising FVE

-

- The 3DR X8+

-

- Lidar lite for altitude sensing
-
- Control UAV using onboard Odroid