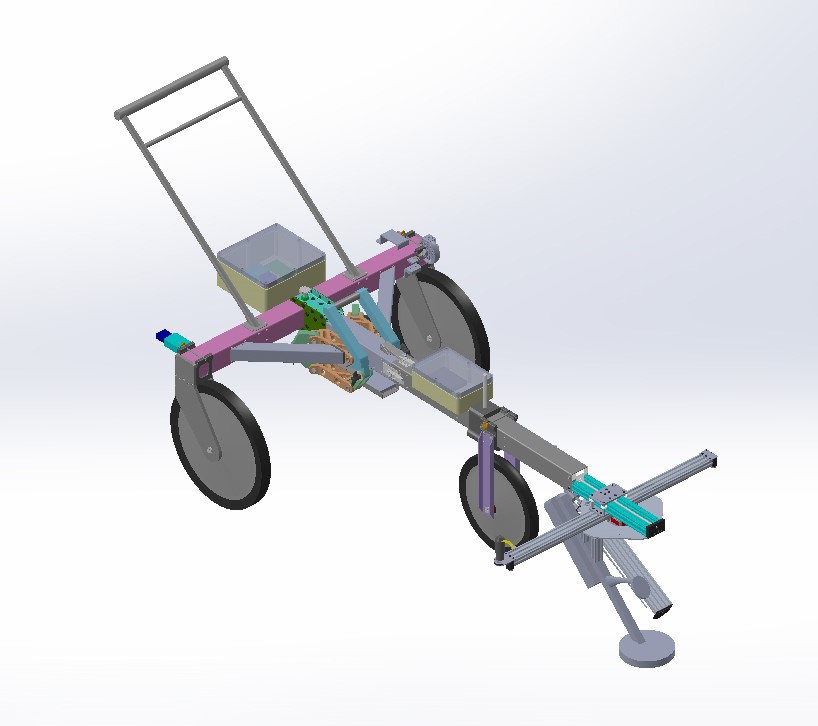
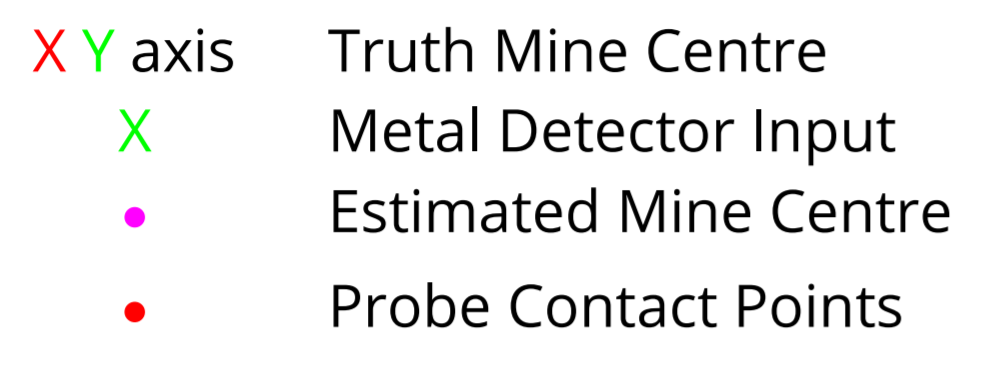
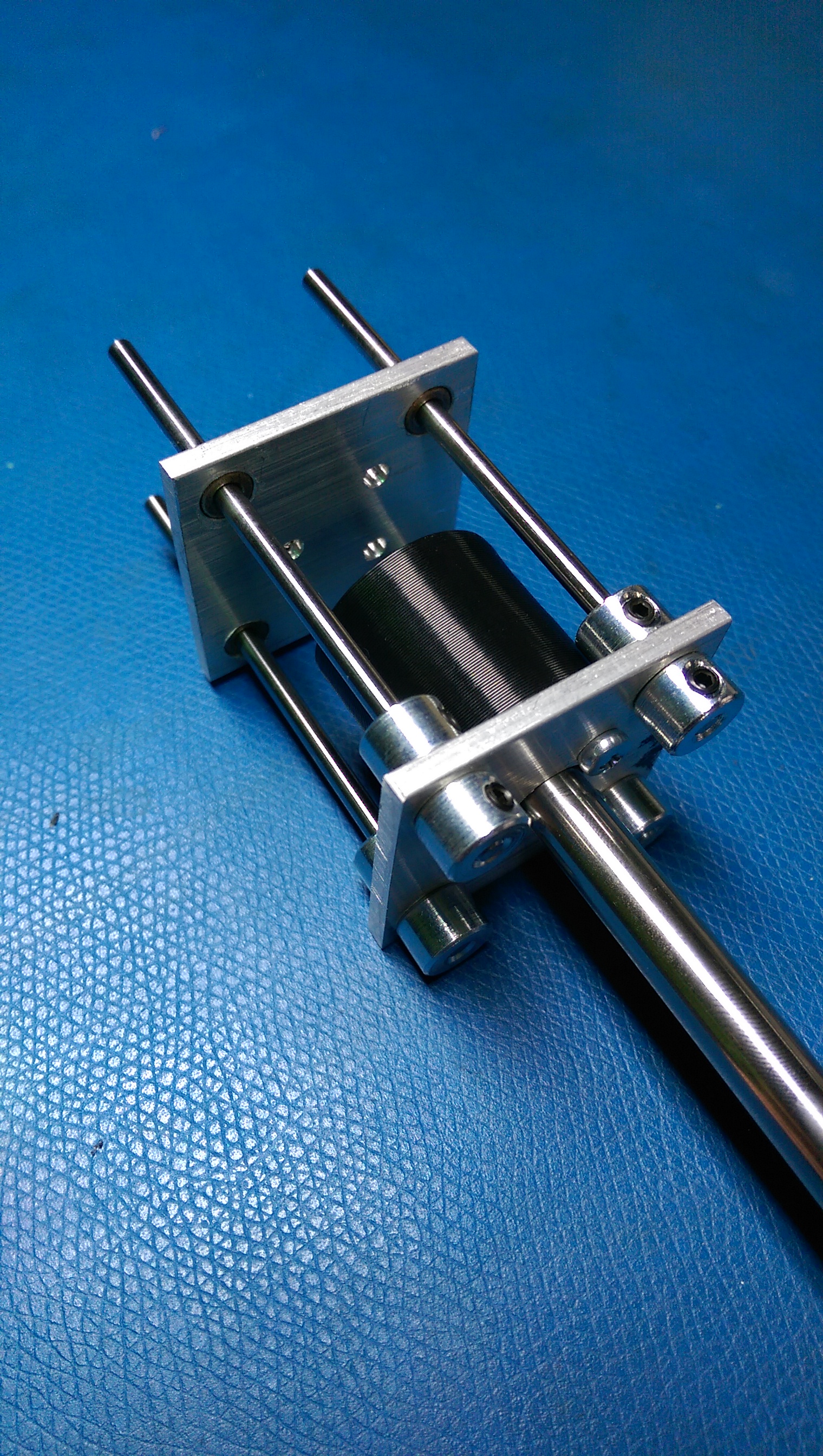
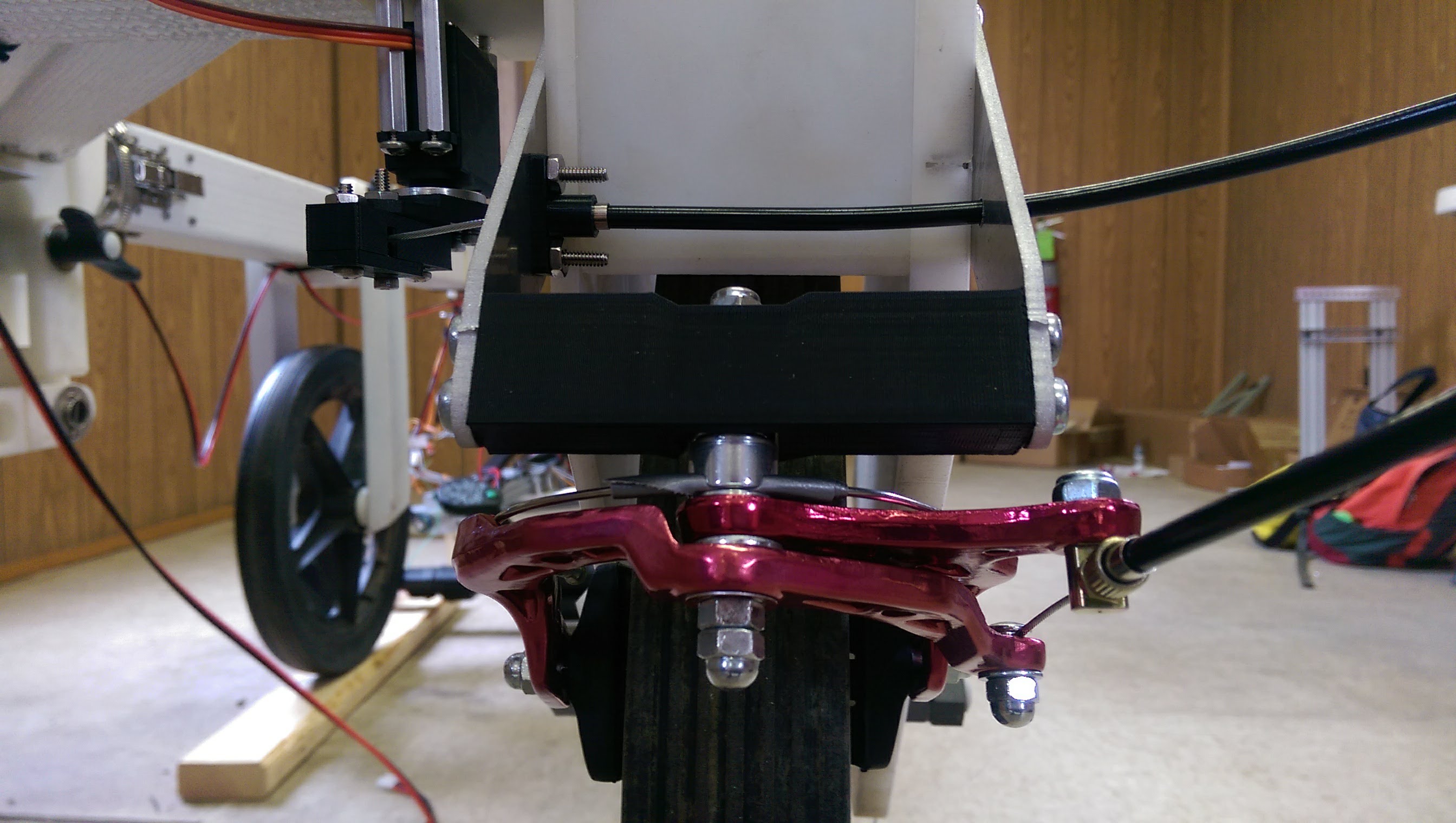
Probing actuation and characterization initial conceptsProbing mechanism initial design
GUI
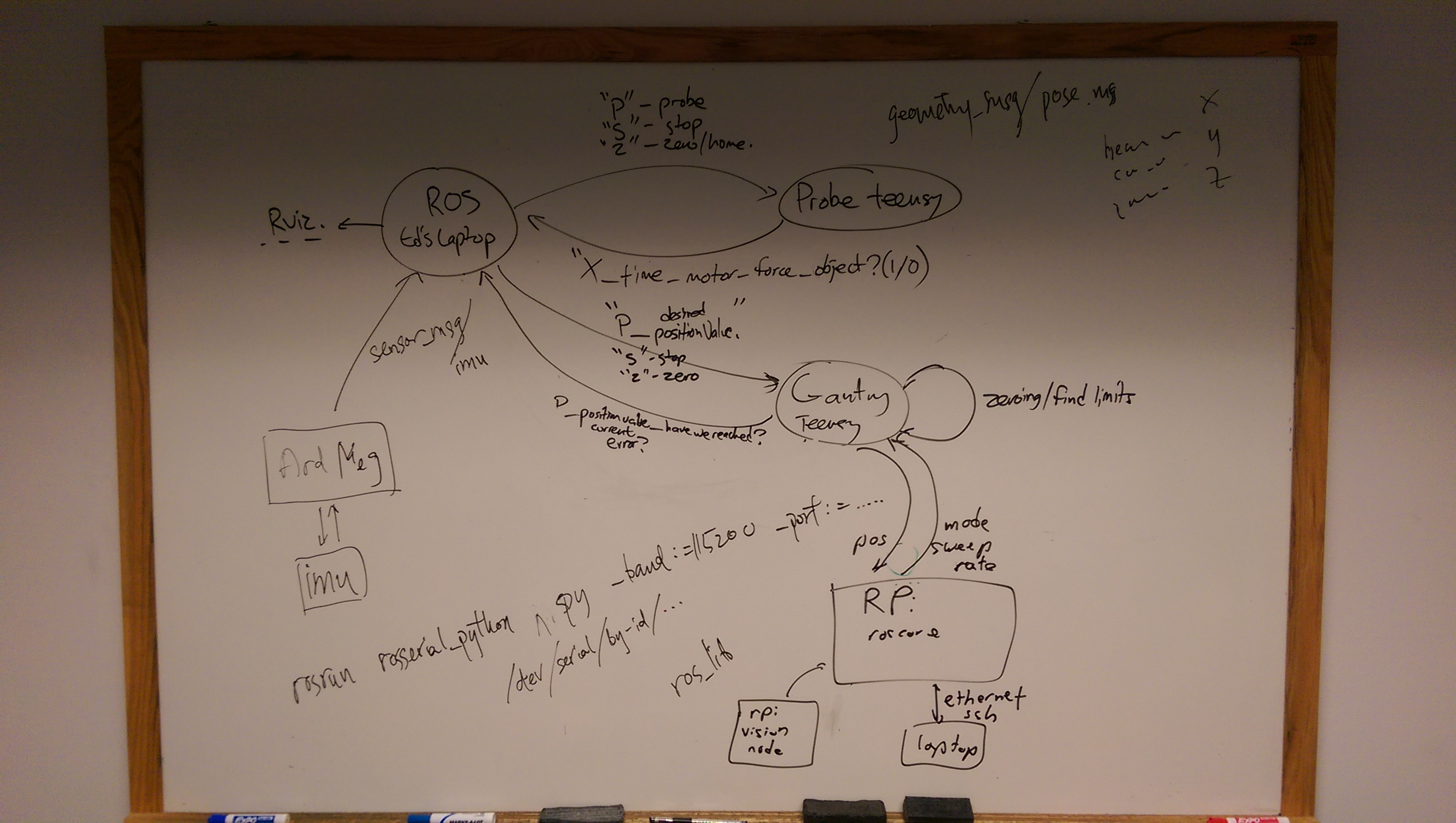
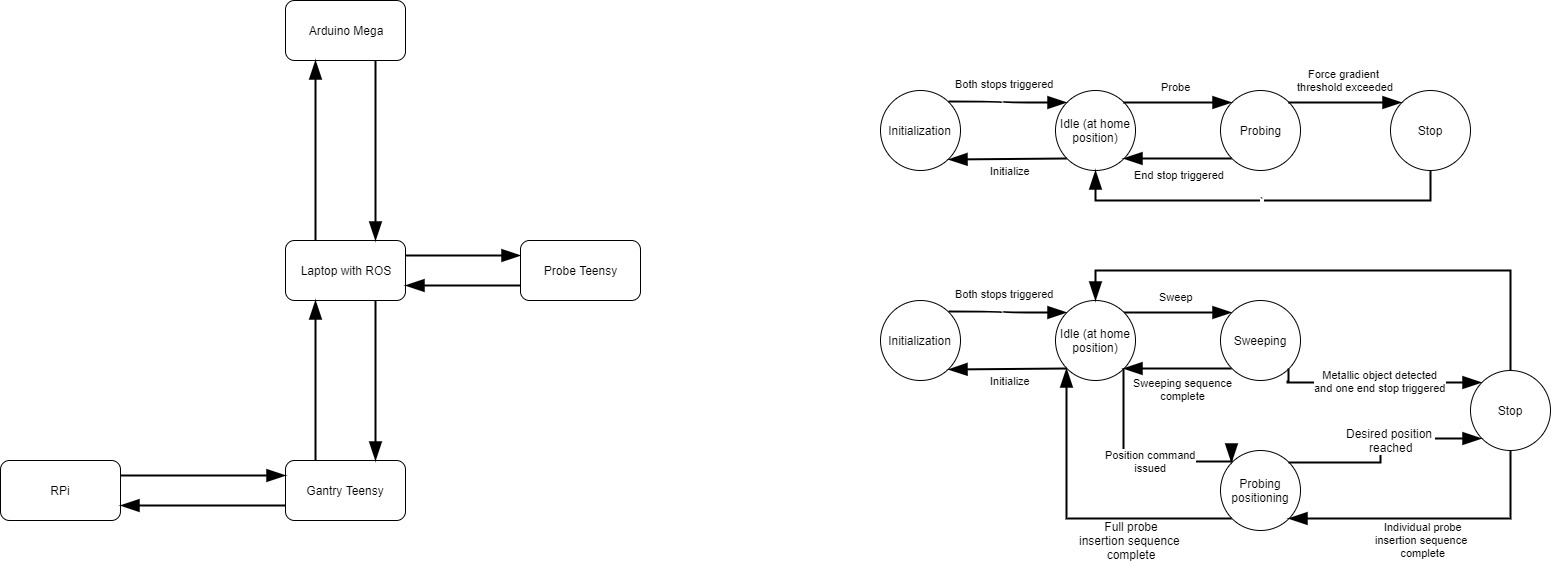
FVE ROS Architecture
Node communication brainstormingROS node architecture for FVE
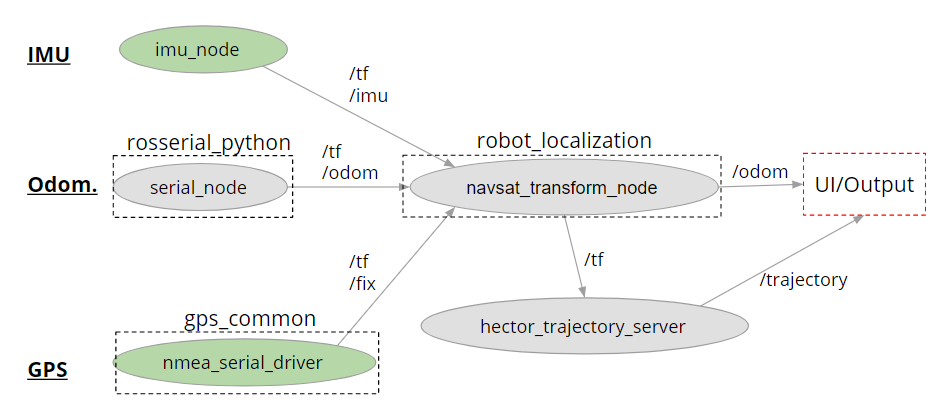
Localization Fusion Testing
Conceptualized localization node graphMounting GPS and IMU on Husky with integrated wheel encoding to live-test sensor fusion and localizatoin visualizataion