Functional Architecture
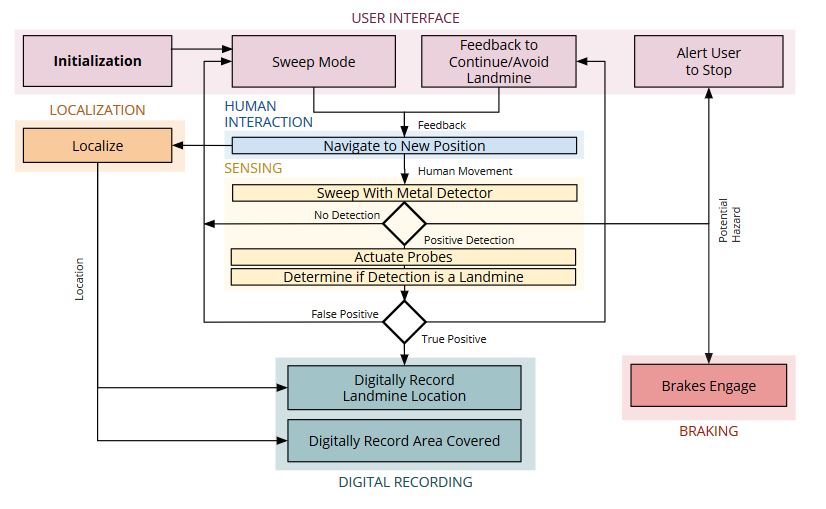
The functional architecture maps the major functions and the flow of data and energy between them based on the system requirements. To start the system, the gantry performs its initialization routine, and the UI marks the operator’s starting position. When the operator is ready, they will press the “Start” button on their user interface and the gantry will begin the sweeping process. As the operator pushes the cart forwards, their location is updated and digitally recorded along with the area covered by the system.
As the cart moves, the metal detector will sweep the area to determine if there is a potential threat. If a potential threat is found, the operator will be directed to stop and the brakes will engage. The metal detector will pinpoint the exact position of the threat and then prompt the operator to begin probing. The probing unit will classify the shape of the detected object. If the target is determined to be a false positive, the operator will be instructed to continue moving the cart along its path. If the potential hazard is determined to be a true positive, its location will be recorded on a digital map of the area. The operator will be alerted of the hazard and will be given feedback to continue surveying, taking care to avoid the newly detected landmine.
Cyberphysical architecture
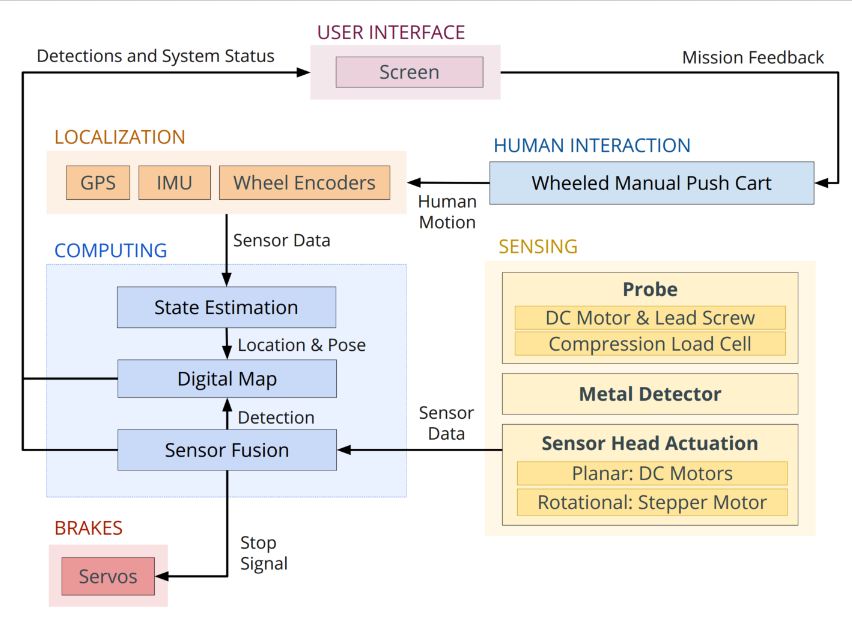
The cyberphysical architecture maps the flow of data and energy between components and subsystems based on the results of our trade studies. The notable aspects are that:
- The vehicle is manually pushed
- The localization is provided by a synthesis of GPS, wheel encoder, and IMU data
- A touchscreen display is used for user interaction
- The probe force sensing is provided by a compression load cell
- A combination of off-the-shelf Direct Current (DC) motors, servos and stepper motors are used for actuation
- An off-the-shelf metal detector is used