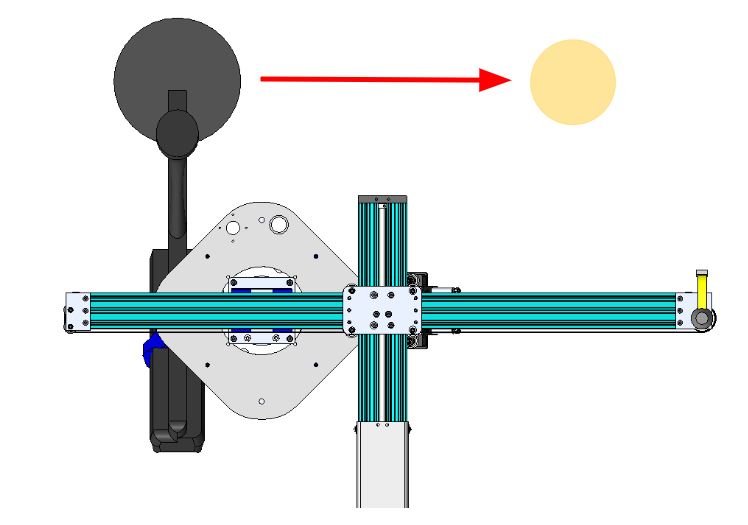
The ClearField Robotics demining cart includes a sensor head, a localization system, and an operator interface. All of this is mounted on the Scorpion demining cart. The sensor head houses both of our sensing modalities, a metal detector and a probing unit, on a three degree of freedom gantry

The metal detector unit sweeps the area in front of the cart. When a potential hazard is sensed, it sends a warning signal to the operator.
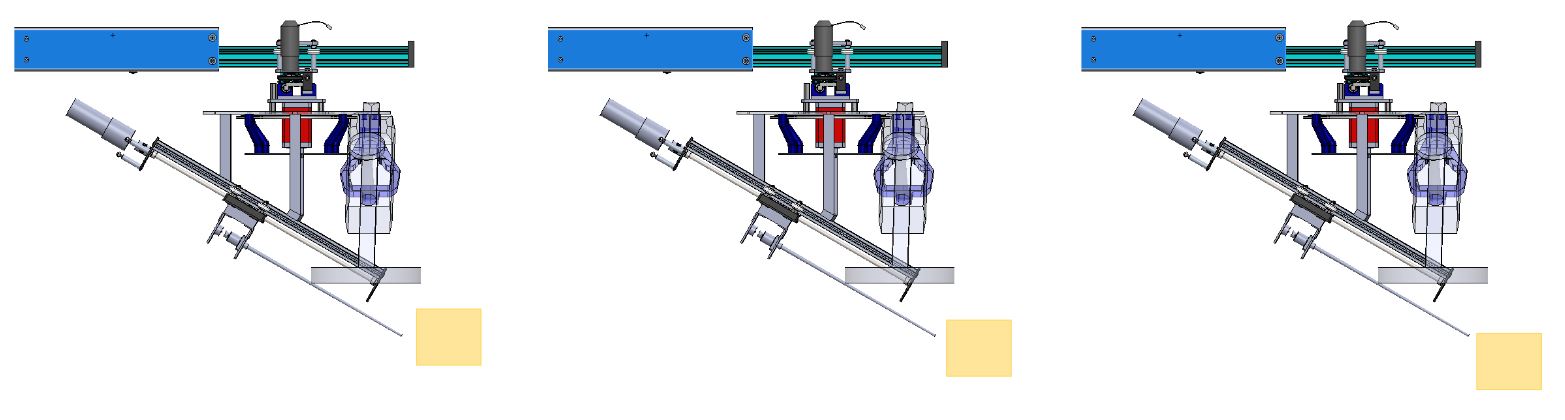
Once the operator has stopped the cart, the probing unit will begin to classify the burried object, first searching from bottom to top…
…and then moving around the perimeter. 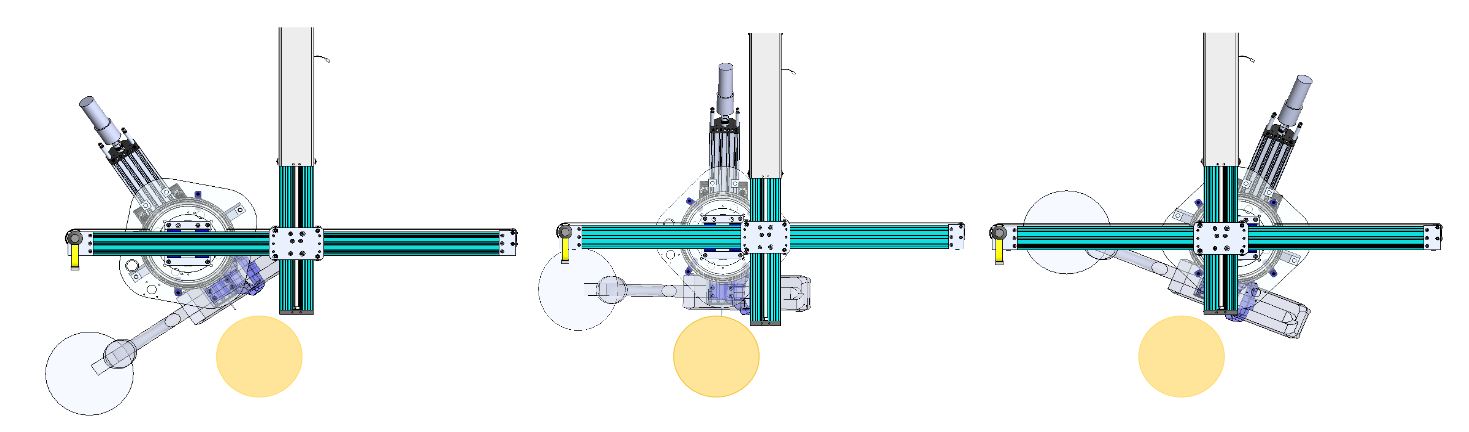
Throughout all processes, we will be recording our location on a digital map to ensure we have covered the entirety of the minefield, and to save as historical records. To acheive the accuracy needed, we will fuse IMU, wheel odometry, and GPS data.

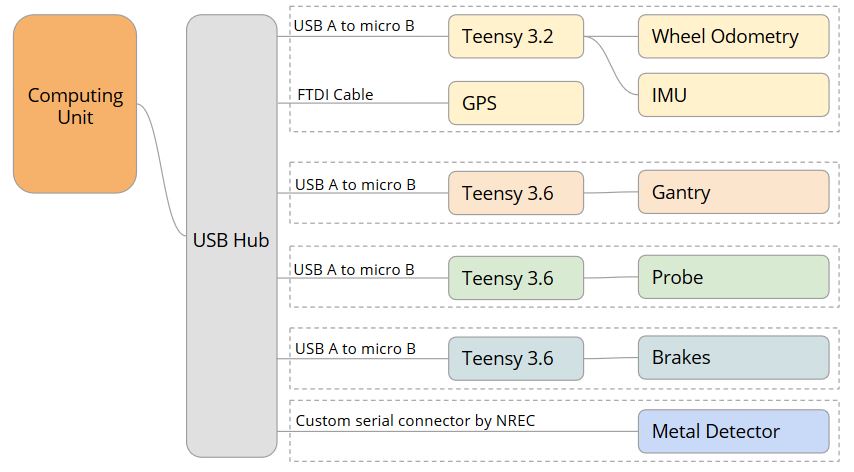
All of our sub-system computing is done on their own Teensy units and communicate with the main computing unit via USB. This allows for a modular system. Our computing and communications architecture is represented here:
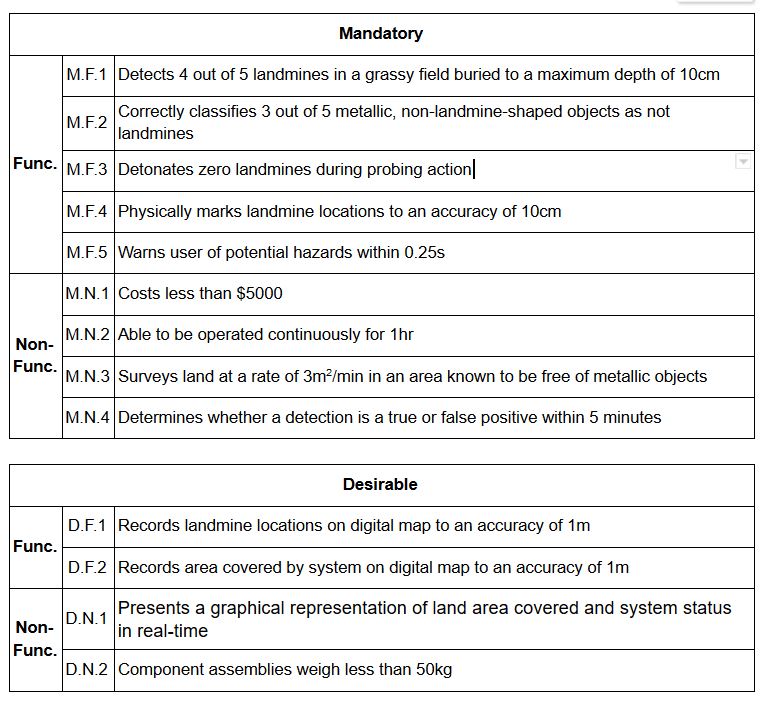
system level requirements
The following list of functional and non-functional requirements guided our system design and validation criterion.