Implementation
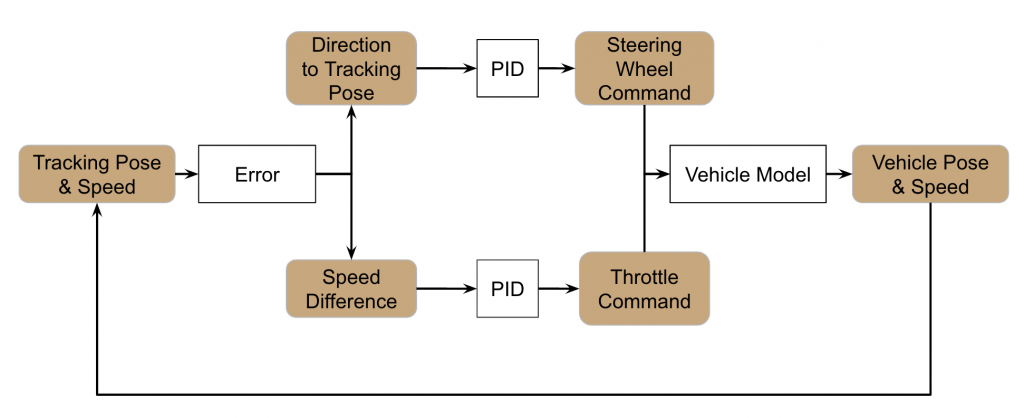
Controller
We are using PID controllers to control the movement of the ego-vehicle. We use two PID controllers in our system:...
Behavior Planner
The behavior planner is a high-level level planner making decisions which are then further decomposed to low-level trajectories by a...

Path Planner
As illustrated in the system architectures, the path planner subsystem is in charge of converting discrete behavioral decisions into continuous...

Simulation Subsystem
The system needs to simulate the environment and external agent behaviors realistically. Thisis an important requirement if the system needs...