Project Management Tools
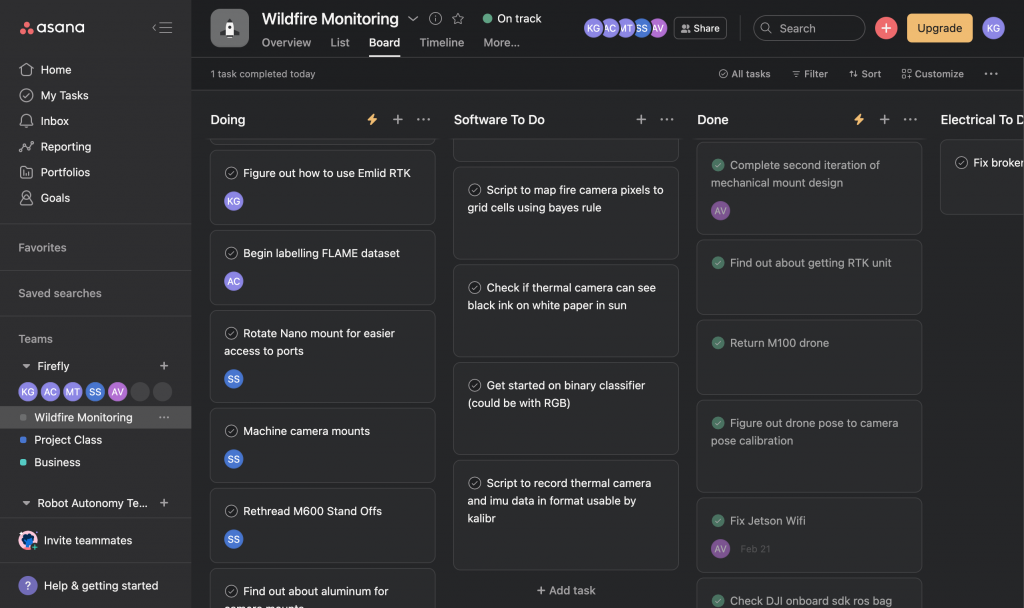
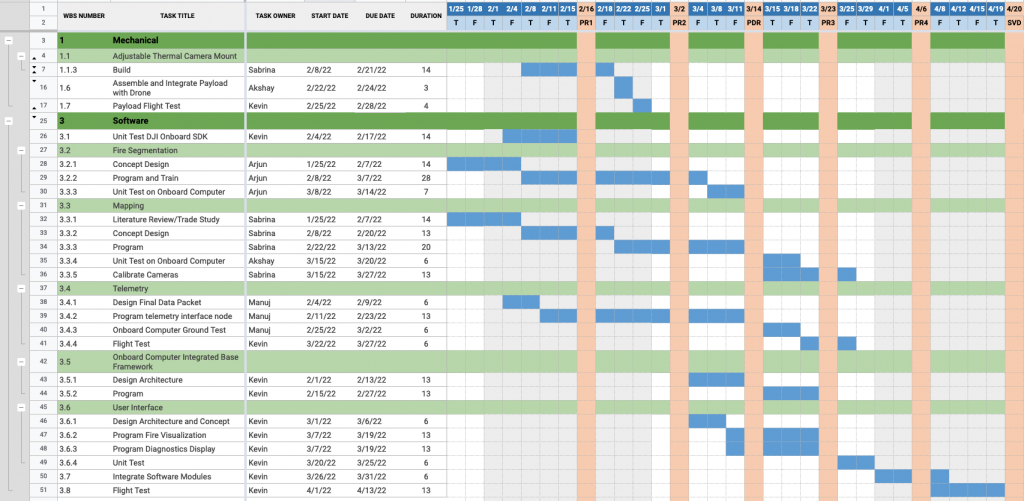
During the Spring semester, the main tools we are using for project management are Asana and Google Sheets. Our long term goals are tracked using a Gantt Chart in Google Sheets and our short term goals are tracked using Asana. Our Gantt Chart is shown in another section on this page. An example screenshot from Asana is shown below. Within Asana, our tasks are broken down into the following categories: Mechanical To Do, Electrical To Do, Software To Do, Management To Do, Doing, and Done.
In the Fall semester, at our liaison’s request, we have switched project management platform to Zenhub where we are able to directly connect issues with our GitHub and organize our upcoming tasks into epics (In our case, we organized our epics as progress reviews), and use the built in scheduling feature.
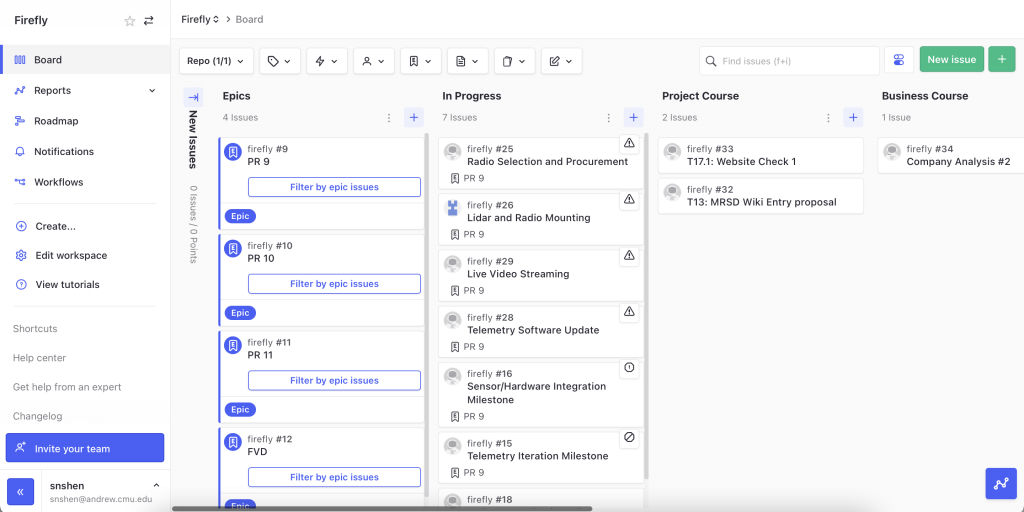
Additionally, since the Air Lab also uses Zenhub for their project management, we are able to interface between our workspaces and see each other’s progress.
Schedule
Spring Presenter Schedule
During the Spring semester, the team will have seven presentations. A list of presenters is provided below.
| Presentation | Presenter |
| Sensor and Motor Control Lab | Kevin Gmelin |
| Progress Review 1 | Sabrina Shen |
| Progress Review 2 | Arjun Chauhan |
| Progress Review 3 | Akshay Venkatesh |
| Progress Review 4 | Manuj Trehan |
| Progress Review 5 | Entire Team |
| Progress Review 6 | Entire Team |
Fall Presenter Schedule
During the Fall semester, the team will have seven presentations. A list of presenters is provided below.
| Presentation | Presenter |
| Progress Review 7 | Akshay Venkatesh |
| Progress Review 8 | Arjun Chauhan |
| Progress Review 9 | Manuj Trehan |
| Progress Review 10 | Sabrina Shen |
| Progress Review 11 | Kevin Gmelin |
| Progress Review 12 | Entire Team |
| Progress Review 13 | Entire Team |
Spring Schedule
| ID/Date | Capability Milestone | Test / Demonstration |
|---|---|---|
| PR1 | Mechanical Design and Fabrication | Cameras, onboard computer, and radio are mounted to DJI M600 Pro |
| PR2 | Basic Fire Segmentation | Plan for fire segmentation approach which will be implemented by the following progress review |
| Basic Fire Mapping | Plan for fire mapping approach which will be implemented by the following progress review | |
| PR3, 3/23 | Complete Fire Segmentation | Segmentation accuracy of at least 70% |
| Occupancy Grid Mapping | Euclidean distance of a projected ground control point is less than 2 meters away from the point’s ground truth position | |
| PR4, 4/6 | Telemetry and Ground Station Visualization | Successful transmission and visualization of fire map updates over radio to the ground station of a 25m x 25m area at 0.5m x 0.5m resolution at 0.1Hz |
| SVD, 4/20 | Full Teleoperated System | Successful mapping of 5 fire hotspots under teleoperated control |
Fall Schedule
| ID/Date | Capability Milestone | Test / Demonstration |
|---|---|---|
| PR8 | – Verify functionality of telemetry override to interrupt Air Lab Core Stack control – Integrate Air Lab Core Stack and verify auto takeoff/landing functionality | Telemetry override using remote controller, and drone autonomously takes off and lands |
| PR9 | – Update controller to follow trajectories instead of waypoints – Telemetry iteration to include larger range and live video streaming – Sensor/hardware integration | Drone follows desired trajectories, and streams back video to ground station. All new sensors integrated |
| PR10 | – Elevation based mapping pipeline – Visualize 2.5D map – Autonomously generates and follows a trajectory that maps the region | Drone updates and maintains a 2.5D fire map, visualized on ground station. Drone autonomously generates trajectories to map a desired region |
| PR11 | – Obstacle avoidance – Ensure robustness to unexpected hardware failures | Drone autonomously avoids any obstacles in its path, and does not crash/stop on unexpected hardware failures |
| FVD | Fully Autonomous System | Autonomous take off and landing. Successful autonomous mapping of all fire hotspots with the required accuracy. Successful visualization of generated 2.5D maps on ground station. |
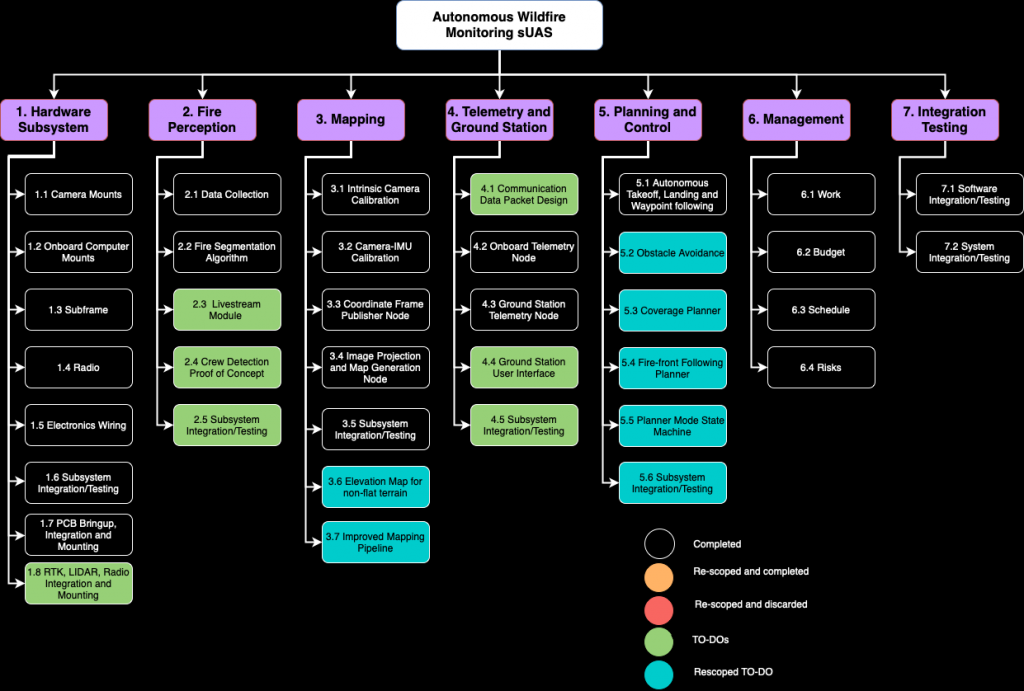
Work Break Down Structure
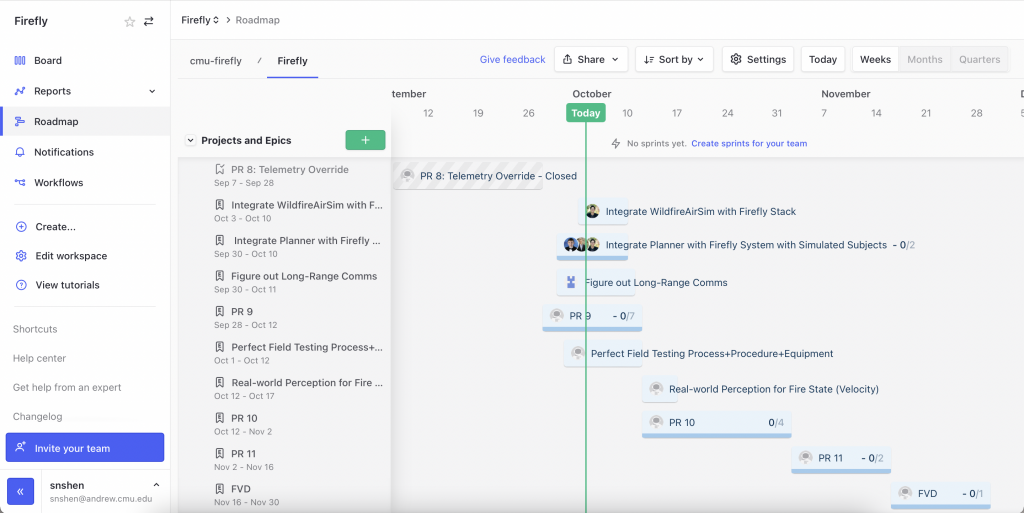
As of October 2022, the work breakdown structure for this project is as follows
Spring Validation Demonstration Plan
Goal
To test the integration of the entire system in mapping wildfires under teleoperation.
Equipment
- DJI M600 Pro (with Mechanical, Electrical, and Optical Subsystems) and DJI GL858A controller
- 5 Portable Camping Stoves with Propane Tanks
- Oven Lighter
- Fire Extinguisher
- 3DM-GQ7 RTK
- Ground Station Laptop
- Ground Station MAVLink 915 MHz Radio
- Timer
Location
CMU Mall
Procedure
- Spread out and place the stoves throughout the Mall
- Measure and record the location of the stoves using the GQ7 RTK receiver
- Input the stove locations into the ground station laptop
- Light the stoves
- Begin timer and begin takeoff of drone
- Fly drone to sweep entire area with DJI M600 Pro cameras
- Land drone and stop timer
- Analyze accuracy of hotspots displayed in UI compared to the RTK-measured ground truth
- Turn off the stoves and clean up all equipment
Verification Criteria
- At least 80% of hotspot locations have a grid cell marked as fire within 5 meters of their location, where the location of a grid cell corresponds to the center of the grid cell
- At least 80% of grid cells marked as fire are within 5 meters of a hotspot location, where the location of a grid cell corresponds to the center of the grid cell
- Flight completed in less than 15 minutes
- UI displays latest fire map throughout duration of flight
Fall Validation Demonstration Plan
Goal
To test the integration of the entire system in mapping wildfires under autonomous operation
Equipment
- DJI M600 Pro (with Mechanical, Electrical, and Optical Subsystems) and DJI GL858A controller
- Portable Camping Stoves with Propane Tanks
- Oven Lighter
- Fire Extinguisher
- 3DM-GQ7 RTK
- Ground Station Laptop
- Ground Station Telemetry Radio
- Timer
Location
CMU Mall or Gascola
Procedure
- Spread out, place and light the stoves in the Mall/Gascola
- Measure and record the location of the stoves using the GQ7 RTK receiver
- Input stove locations into ground station laptop
- Begin timer and take off drone
- Fly drone in autonomous mode to sweep the area designated via UI with DJI M600 Pro thermal and RGB cameras
- Monitor video stream from drone during flight
- After sweep, attempt to land over an obstacle (trash can)
- After successful landing, analyze accuracy of hotspots displayed in UI compared to RTK measured ground truth
- Put out the camping stove fires
Verification Criteria
- Hotspots are detected with a FPR and FNR less than 20%
- Hotspots localized with absolute accuracy less than ± 5 meters
- Flight completed in less than 15 minutes
- UI displays latest fire map throughout duration of flight
- RGB/thermal video is successfully streamed back to ground station at 20 fps at a 640×480 resolution
- Autonomous landing handles obstacles successfully and lands adjacent to it
- Terrain 2.5D height maps generated and successfully displayed by ground control station
Other Project Management Links
Spring Test Plan
Fall Test Plan
Inventory/Parts List
Budget (Purchase Tracker)
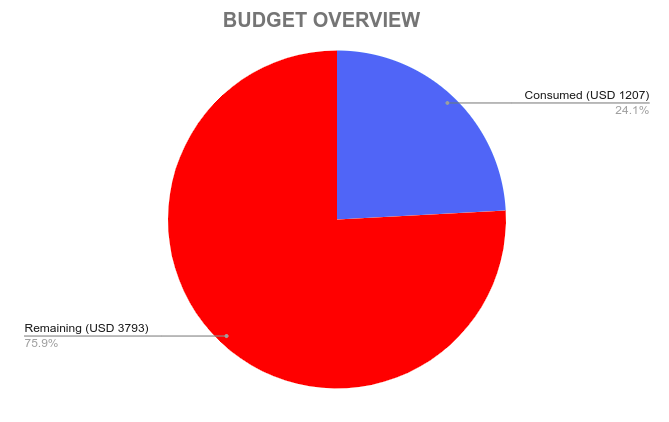
Expense by category:
| Category | Expenses (USD) | Percentage Expenditure |
| Field Testing Equipment | 548.25 | 45.41% |
| Mechanical Tools | 333.03 | 27.58% |
| Electronics Equipment | 261.05 | 21.61% |