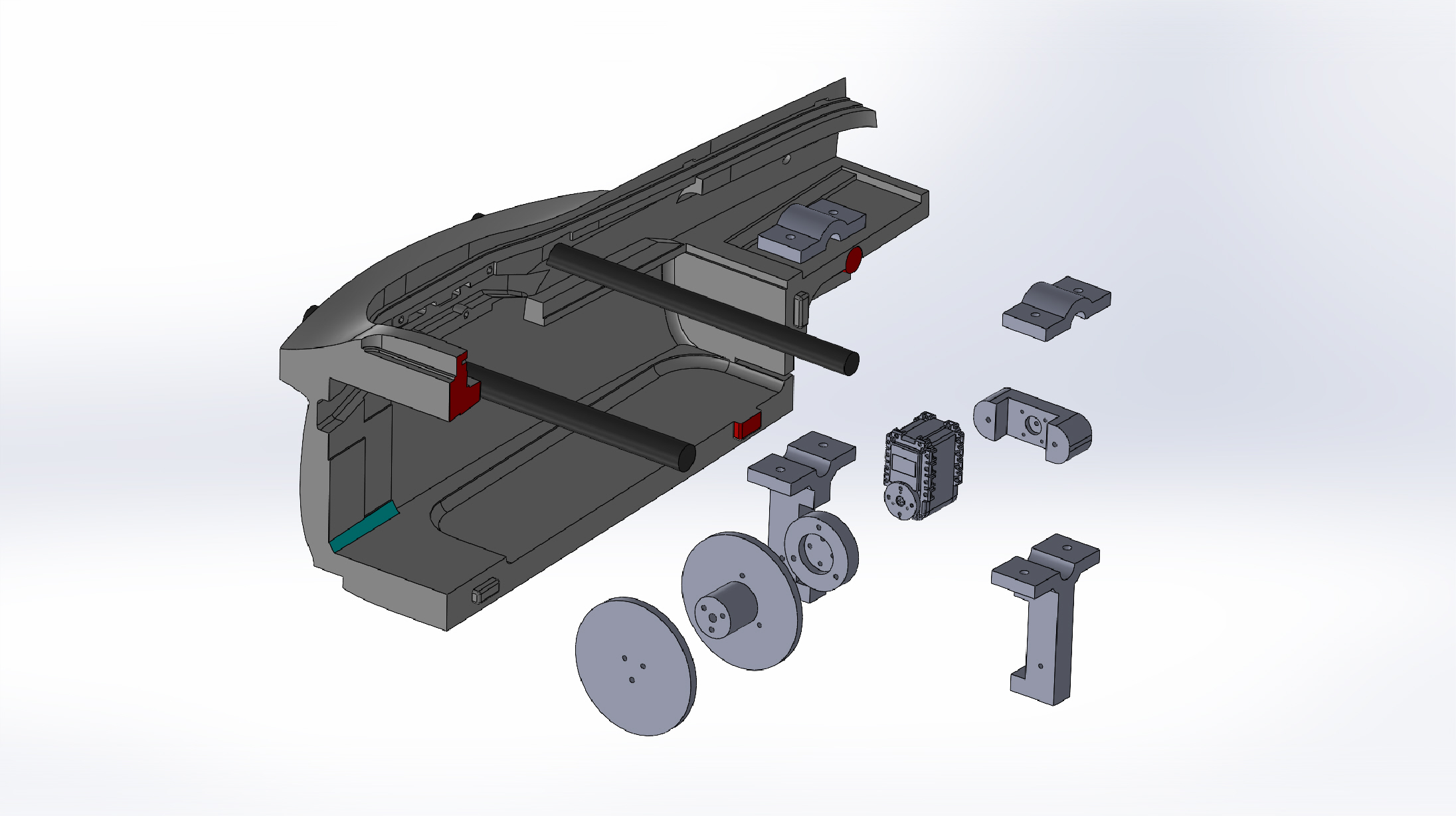
Delivery Subsystem Overview
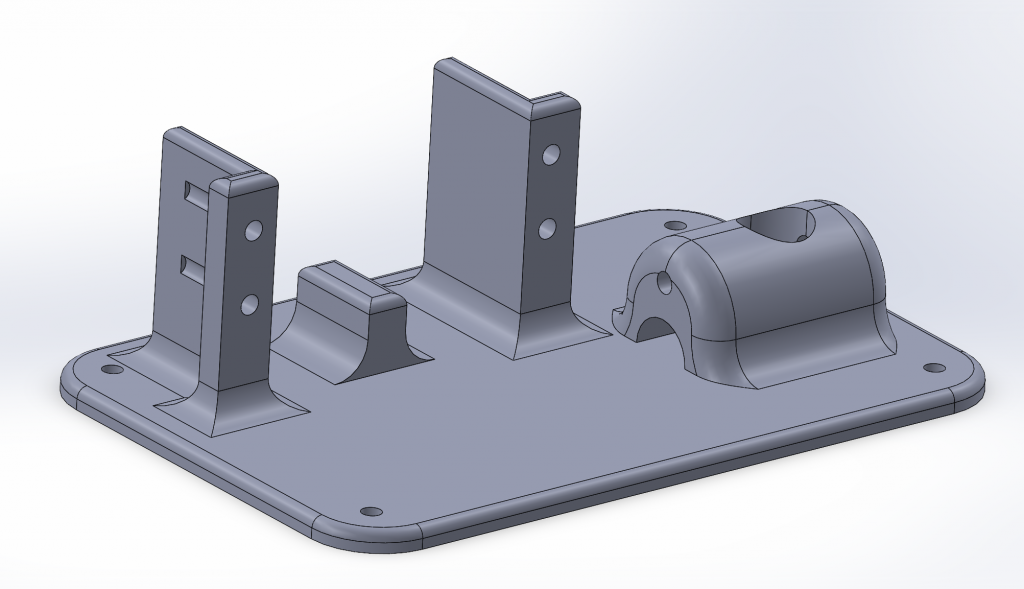
The delivery subsystem is broken up into 3 main components, each with its own layer of actuation. When put together, they will allow the VTOL to safely carry, lower, and delivery a package as per our performance requirements. Over this first semester of development, each subsystem has been prototyped and iterated, and a completed subsystem will be presented at SVD. This subsystem will not however be integrated with the VTOL until the fall.

Lowering Mechanism
The objective of the lowering mechanism is to lower the package at a steady rate when the VTOL is in delivery position. This design was built around a Dynamixel AX-12A.
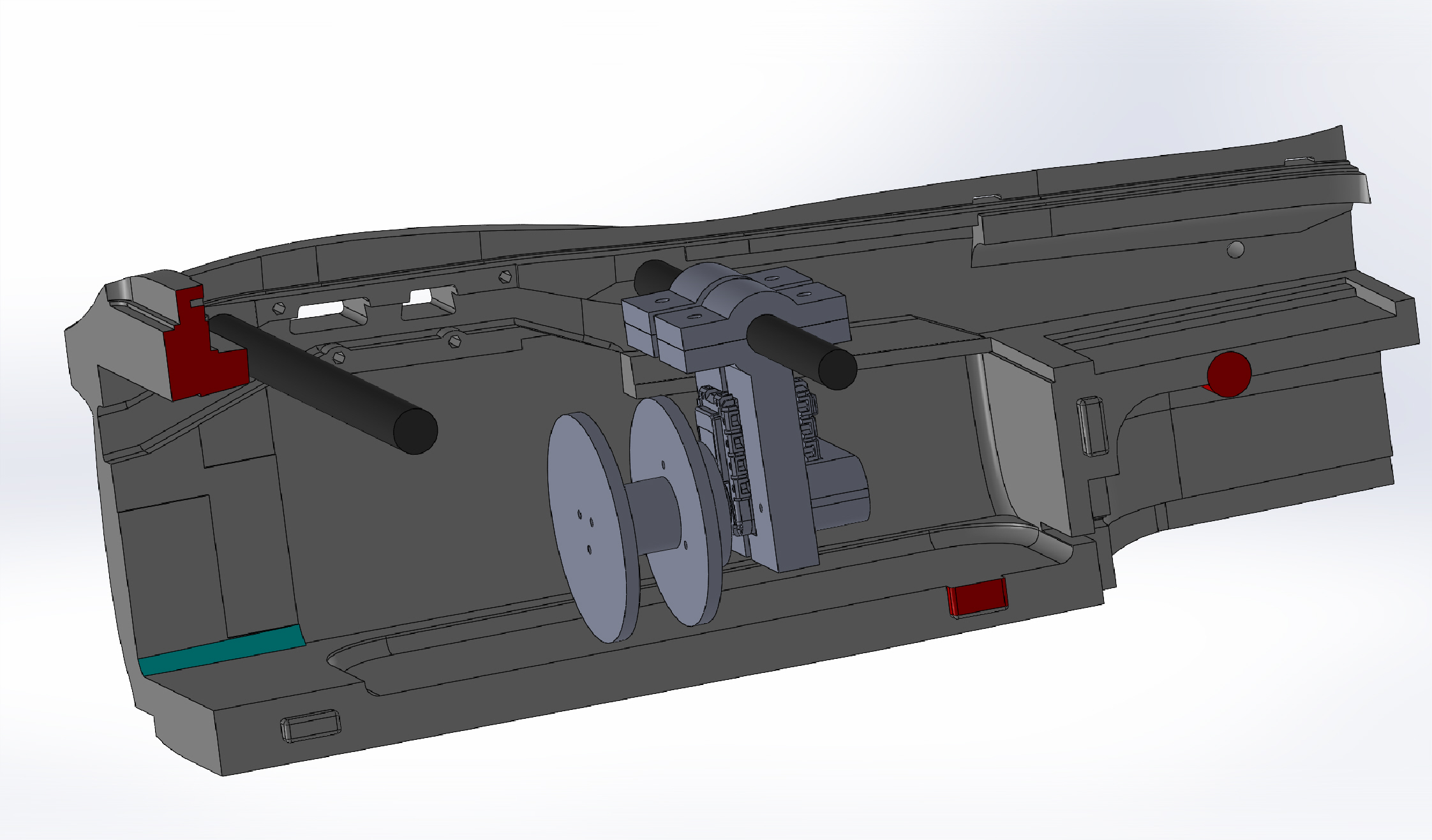
Holding Mechanism
The objective of the holding mechanism is to passively secure the package during flight. This reduces the load on the lowering mechanism, and ensures that we meet a key part of our functional performance requirements that addresses the VTOL’s ability to never drop the package unless intended.
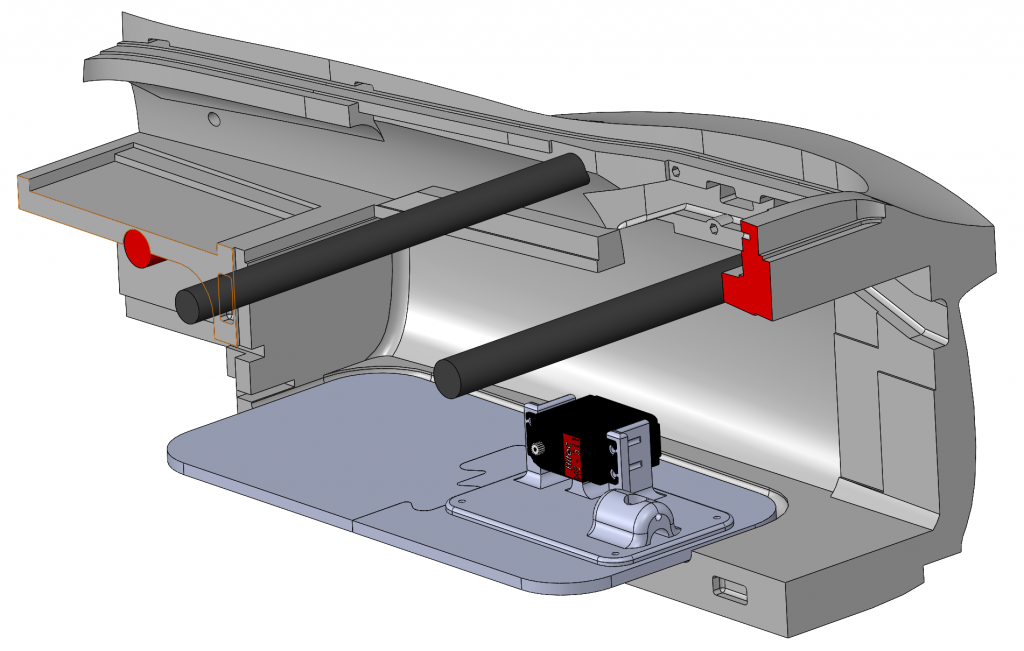
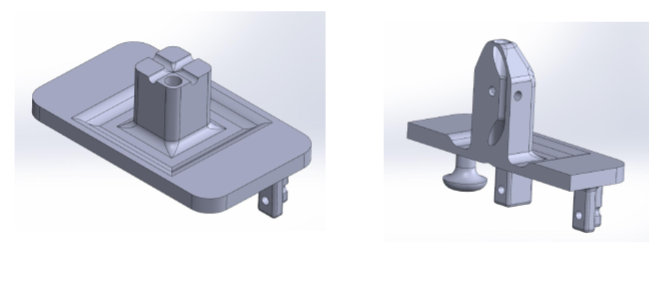
Release Mechanism
The objective of the release mechanism is to detach the package from our delivery subsystem when commanded by the companion computer. When the package is lowered, it is the release mechanism that must actuate at the bottom of the cable to release the package and complete the delivery.