Why Robot Search & Rescue?
- Lower risks for both rescuers & victims
- In the USA, roughly 70 firefighters die every year
- 343 firefighters died in the 9/11 tragedy
- Injury compensation: approximately $50,000 to $200,000 / fire department * year
- That means $1,500 to $5,500 per firefighter per year
- Unknown factors pose a threat to firefighters, but robots are dispensable
- In the USA, roughly 70 firefighters die every year
- Higher Efficiency
- Search through areas intelligently while actively sensing the environment in all directions
- Robots can collect essential data aiding rescues operations
- Build 3D maps for following firefighters to locate points of interest
- Provide useful information to speed up operations and avoid threats
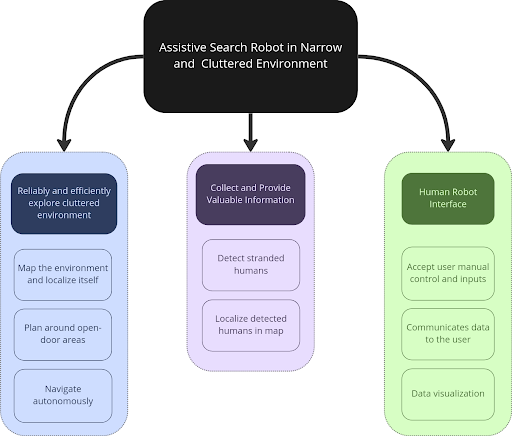
Project description
As a starting point to further the initiative and solve a practical problem, our DarkBot serves as the initial proof of concept (POC) of a quadruped robot search and rescue topic for indoor disastrous scenarios. DarkBot will be deployed by first responders when deemed necessary. During a typical mission, DarkBot will explore designated areas autonomously to provide valuable information back to the first responders, including the schematic of the environment and points of rescue interest, with a goal to accelerate field operations at minimal human risks. It will fully utilize its legged mobility advantage and adaptive decision-making to demonstrate the possibility for a robot to be the game changer in time and safety-critical scenarios. This development and testing of the project will be arranged in NSH, various terrains on campus, and Hawkins hospital.
Use Case with System Graphical Depiction
A unit of first responders (FRP) gets a disaster alert (fire/gas leak/nuclear/earthquake). Victims stuck in the building must be rescued. However, it is unsafe for the first responders to enter the building. There is damage to the interior building structure, and the spread of the hazard (fire/toxic gas/radiation) is unknown.




DarkBot enters the scene following the trail of an FRP. The FRP halts behind an entrance because the situation behind it is unpredictable and dangerous. It might be concealing harmful gases or unstable structures. On the command of the FRP, DarkBot gets deployed through the entrance. As the robot traverses, it finds open doors that it enters, actively explores, and rapidly reconstructs the 3d map of the site. It captures any potential hazards on the site, like combustible signs/gas leakage, and helps identify valuable artifacts such as survivors, drills, fire extinguishers, etc. The electricity is out, so it must detect and navigate in low-light conditions.
As the search robot explores the building, the collected information is stored and sent back to the FRPs, so they know the indoor structure and the location of victims, among other valuable artifacts, and thus make better decisions. The FRP, upon entering, localizes him/herself within the map created by the search robot. The FRP can be alerted near locations flagged as potential hazards.