Schedule
Spring Project Schedule
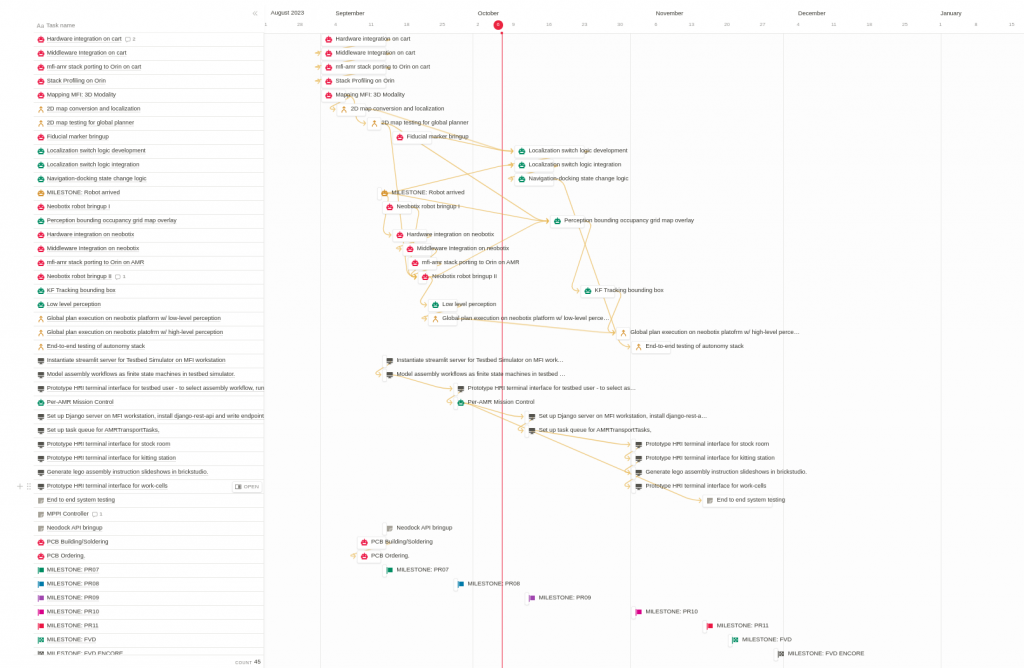
Progress Reviews
List of presenters for Progress Reviews this upcoming fall:
- Sergi Widjaja (PR 7)
- Vineet Tambe (PR 8)
- Sushanth Jayanth (PR 9)
- Soham Bhave (PR 10)
- Siddhant Wadhwa (PR 11)
Test Plans

Parts List
Link to list of items purchased
Decision Log
| Decision ID | Type | Decision | Decision Date | Comments |
|---|---|---|---|---|
| 1 | Technical | A set of parallel workstreams are established. One for developing an MVP version of the autonomy stack (v1.0), one is to integrate more robust subsystem capabilities for a more robust autonomy stack (v2.0). | September 27th, 2023 | Sushanth to be the owner of the MVP autonomy stack workstream (v1.0), Soham to be the owner of v2.0 autonomy stack workstream. Parallel workstream can be established due to minimal dependencies. |
| 2 | Technical | A per-AMR mission control stack to be developed to interface with the offboard infrastructure | September 20th, 2023 | Per AMR mission control stack to be developed by Sushanth |
| 3 | Technical | Deprioritization of 3D localization workstream in favor of docking | September 20th, 2023 | Robot arrival necessitates this change to enable us to move towards an MVP version quick. |
| 4 | Technical | Robot still maintains a pose while docking to reduce localization interplay. | September 27th, 2023 | To be wary of any integration issues that may come |
| 5 | Technical | Behavior tree-like algorithmic structure to enable docking | September 18th, 2023 | To interface easily with the offboard infrastructure. |
| 6 | Technical | Map downsampling to reduce memory and runtime overhead for CBS planner | September 15th, 2023 | To reevaluate once integration with offboard infrastructure is underway. |
| 7 | Technical | Create a custom Waypoint Follower | October 28th, 2023 | Part of mitigation strategy for ROS2 Nav2 problems |
| 8 | Technical | Robot docking too inaccurate due to 2D localizatioon | November 1st, 2023 | Use Fiducial marker for docking Use the weight of odom factor in the configs. |
| 9 | Technical | Velodyne causing network issues - preventing from SSHing into the Orin. | November 15th, 2023 | Reset the velodyne IP to a different subnet |
| 10 | Technical | No cancel workflow command available | December 1st, 2023 | Add a cancel command to all workflows. |
Issues Log
| Issue ID | Description | Owner | Resolution |
|---|---|---|---|
| 1 | Decentralized multirobot planner might not be efficeint. | Vineet | Plan Migration to centralized approach by start of Fall 2023 |
| 2 | Late robot procurement | Sergi | Frontload tasks that can be done via simulation |
| 3 | Power supply integration issues | Sergi | Skipping PCB directly and use the 12V power supply coming from the robot Made 4 sets of cables for the the Jetson and VLP16 for the 2 robots. |
| 4 | Robot control interface must happen with ssh | Vineet | Initialize a multi robot command center infrastructure through a single laptop |
| 5 | 2D and 3D map alignment issue | Vineet, Sergi | Fixing the origin transform in the base map.pgm file. |
| 6 | Robot gets stuck in a given path | Sushanth | Reduce the costmap dilation for navigation and hyperparameter tuning |
| 7 | Robot #2 cannot get booted up | Soham | Remote call with robot's manufacturer lead application angineer scheduled |
| 8 | ROS2 Nav2 default waypoint follower does not work with namespacing | Vineet | Write a custom waypoint follower |
| 9 | The Robot can not go too close to walls head-on due to safety lidar constraints preventing docking | Sushanth | Instead of going head on - back into the dock location |
| 10 | There is no cancel command for workflow | Sushanth, Siddhant, Vineet | Add a cancel command |
| 11 | Robot de-localizes very easily and there is no time to debug and integrate 3D localization | Sergi, Vineet, Sushanth | Rely more on the odom instead |
Risk Management
| Risk ID | Description | Risk Owner | Type | Likelihood | Consequence | Mitigation |
|---|---|---|---|---|---|---|
| 1 | The mobile robot platform is expected to arrive in July. This would impact controls and integration tasks. | Siddhant | Schedule | 5 | 3 | SVD FVD work packages redistributed to prioritize subsystem development in Spring 2023, and inter-subsystem integration, including with the mobile robot platform, planned for Fall 2023 |
| 2 | Lidar localization errors can throw off positional accuracy guarantees made by the planner/controller. | Sergi, Sushanth | Technical | 3 | 5 | Add fiducial markers to testbed environment to help correct for localization errors in error hotspots |
| 3 | Potential Integration challenges with Testbed | Vineet, Sergi, Sushanth, Siddhant, Soham | Technical | 3 | 4 | Collaborating with the testbed project team to develop software and hardware interfaces |
| 4 | Power supply on MP400 - the robot might not ship with a usable 24V/12V output port. Which would mean we would not be able to power the added onboard sensors and compute | Vineet | Technical | 1 | 3 | Developed a Power Distribution Board capable of utilizing both 24V and 12V DC inputs to power all sensors and compute |
| 5 | Potential issues arising from ROS2 cross-distribution communication | Soham | Technical | 3 | 4 | Ran experiments to find the latency of communication with a setup that would closely resembles the final setup |
| 6 | 3D - octomap representation unsuitable for mfi-testbed setup | Vineet, Sergi | Technical | 1 | 3 | Planner using 2D occupancy grid to generate costmap has been developed |
| 7 | PCB parts not arriving in time - preventing deployment of the sensor pod | Vineet | Technical | 4 | 2 | Skip PCB and directly connect to 12V onboard supply |
| 8 | Centralized planner not robust by the time integration exercise commences (PR11) | Vineet | Technical | 2 | 4 | Test various cases on simulation and track the bugs, Fallback to decentralized planner |
| 9 | 2D and 3D maps are not aligned with downstream coordinate transform issues with downsampled map | Sushanth | Technical | 2 | 4 | Fixing the origin transform in the base map.pgm file to align the origin of all the maps - this will simplify the issues. |
| 10 | MVP version of autonomy stack not ready by the time integration exercise commences | Sergi | Technical | 2 | 5 | Only include integration-ready components for demonstration Parallel workstreams established between MVP version and robust version of autonomy stack. |
| 11 | ROS2 Nav2 default waypoint follower does not work with namespacing | Vineet | Techinical | 5 | 5 | Write a custom waypoint follower. |