Schedules
Progress Reviews Presenters
Spring:
- Leonardo Mouta Sensors and Motor Lab [8th February 2024]
- David Hill Progress Review 1 [15th February 2024]
- Yatharth Ahuja Progress Review 2 [29th February 2024]
- Louis Plottel Progress Review 3 [21st March 2024]
- Michael Gromis Progress Review [4th April 2024]
- David Hill Power Distribution System PCB Lab [9th April 2024]
Fall:
- Louis Plottel Progress Review 7 [11th September 2024]
- Michael Gromis Progress Review 8 [25th September 2024]
- Yatharth Ahuja Progress Review 9 [9th October 2024]
- Leonardo Mouta Progress Review 10 [30th October 2024]
- David Hill Progress Review 11 [13th November 2024]
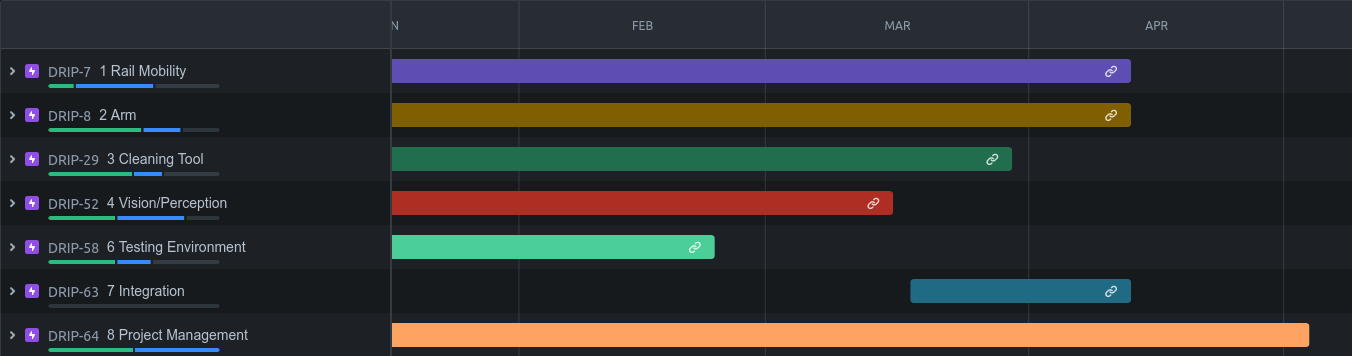
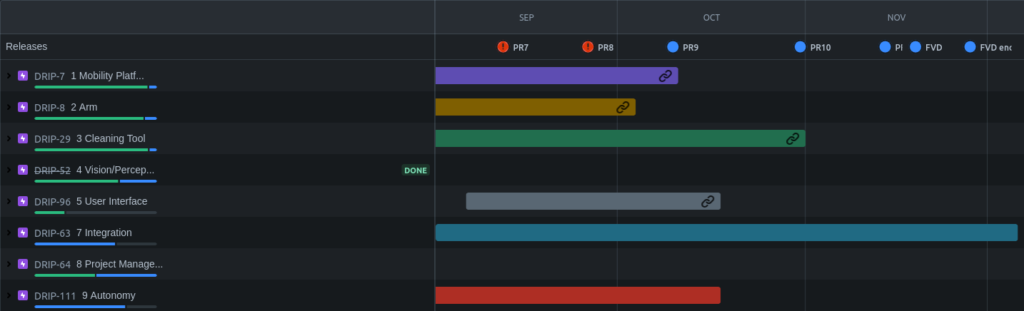
Gantt Chart of Development Schedule
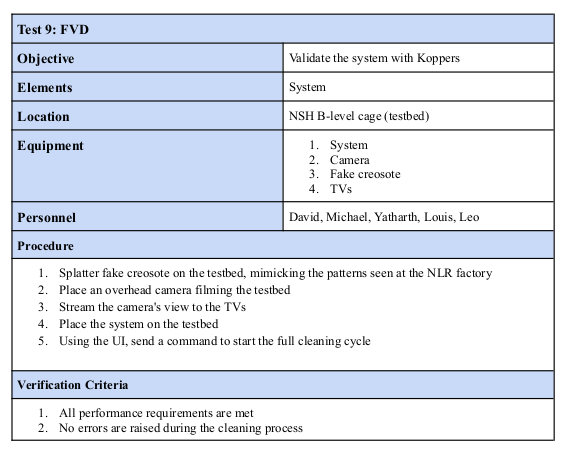
Test Plan
Link to our full Spring test plan.
Highlight of our Spring Validation Demo (SVD):
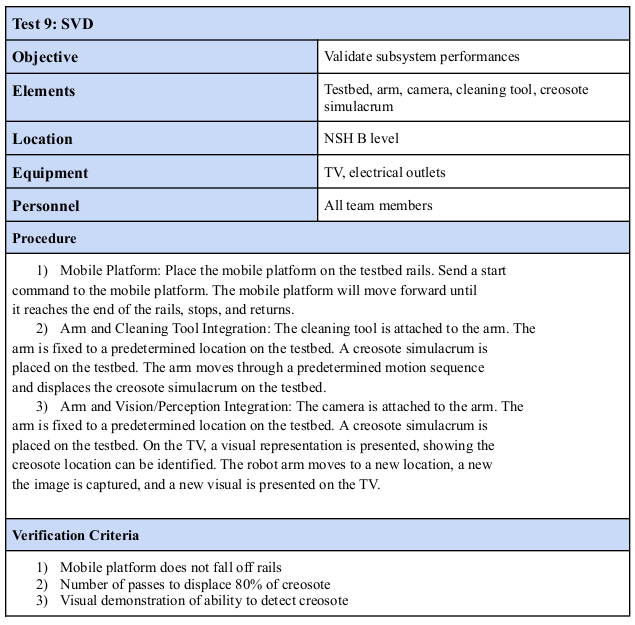
Link to our full Fall test plan.
Highlight of our Fall Validation Demo (FVD):
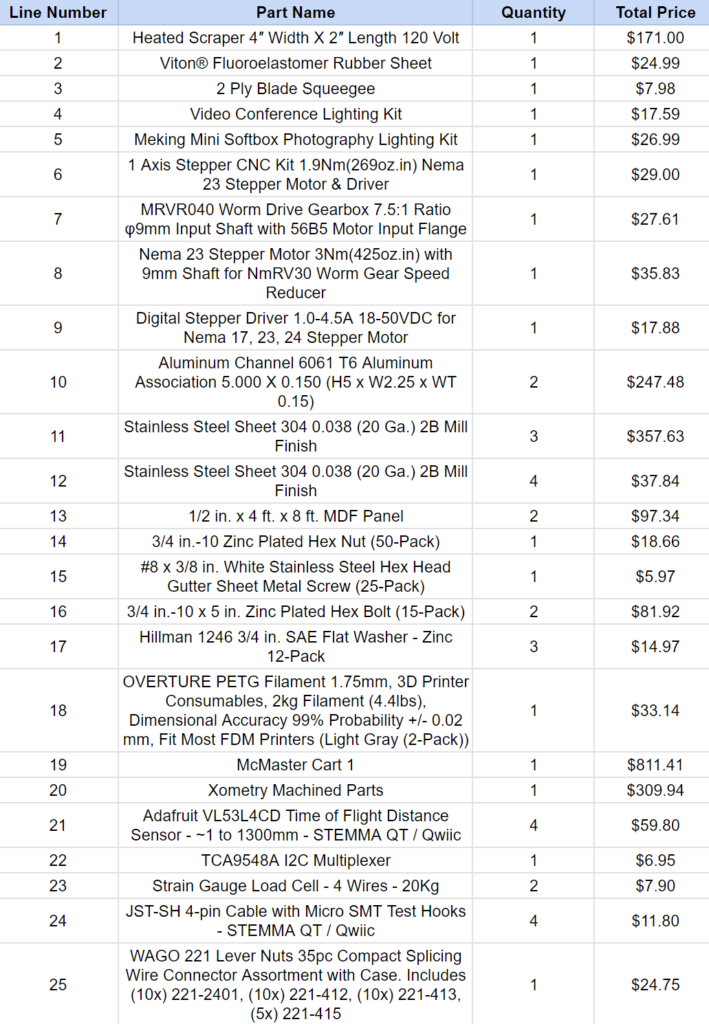
Parts List
Issue Log
| Number | 1 |
| Date Initiated | Oct-2023 |
| Date Resolved | Nov-2023 |
| Participants | yahuja, mgromis, dhill, lmoutape, lmplotte |
| Description | Decision on which platform to use for the system |
| Options | Robotic arm on rails, mobile arm on dp surface, humanoid robot on factory floor |
| Resolution | Settled on robotic arm on rail |
| Justification | Simplest platform to implement that still allows us to achieve the mission objectives |
| Number | 2 |
| Date Initiated | Feb-2024 |
| Date Resolved | Feb-2024 |
| Participants | yahuja, mgromis, dhill, lmoutape, lmplotte |
| Description | Decision on how to handle arm delay |
| Options | Change platform concept, focus on simulation, get another arm |
| Resolution | Settled on focusing on simulation |
| Justification | This path allows us to continue working until arm arrives, without forcing us to change our design or spend more money |
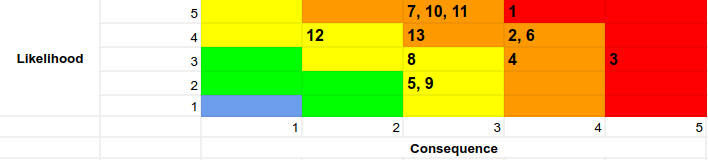
Risk Management
| ID | Risk | Req | Type | Likelihood | Consequence | Mitigation |
| 1 | Robot arm may not fit within budget | NF4 | Cost | 5 | 4 | Ask Koppers to buy the arm |
| 2 | Delivery of arm is delayed | N/A | Schedule | 4 | 4 | Order components early |
| 3 | Arm integration with cleaning tool not able to clean creosote in practice | F5 | Tech | 3 | 5 | Test frequently |
| 4 | System damages the drip pan | NF3 | Operation | 3 | 4 | Include safety features |
| 5 | Someone from Koppers leaves | N/A | External | 2 | 3 | Keep detailed documentation |
| 6 | Need a strong linear actuator for heavy arm | F4 | Tech | 4 | 4 | Design requirement |
| 7 | Hard to know all lighting conditions in factory | F2 | Tech | 5 | 3 | Test with different light conditions |
| 8 | Need to keep camera clean from creosote | NF5 | Tech | 3 | 3 | Design |
| 9 | Koppers not ok with a camera in their factory | N/A | Operation | 2 | 3 | Ensure camera does no recordings |
| 10 | Missing drawings | N/A | External | 5 | 3 | Contact sponsor for full tech drawings |
| 11 | Cannot send torque commands to the robot | F5 | Tech | 5 | 3 | Add linear elastic actuator for precise force control |
| 12 | Camera is EOL, support ending | N/A | Tech | 4 | 2 | May need to buy a new camera or use older software |
| 13 | Depth sensing bad with current camera | F5 | Tech | 4 | 3 | Check other alternatives |