Design Brainstorming
Here we keep a list of drawings and diagrams of some possible designs we explored throughout the project.
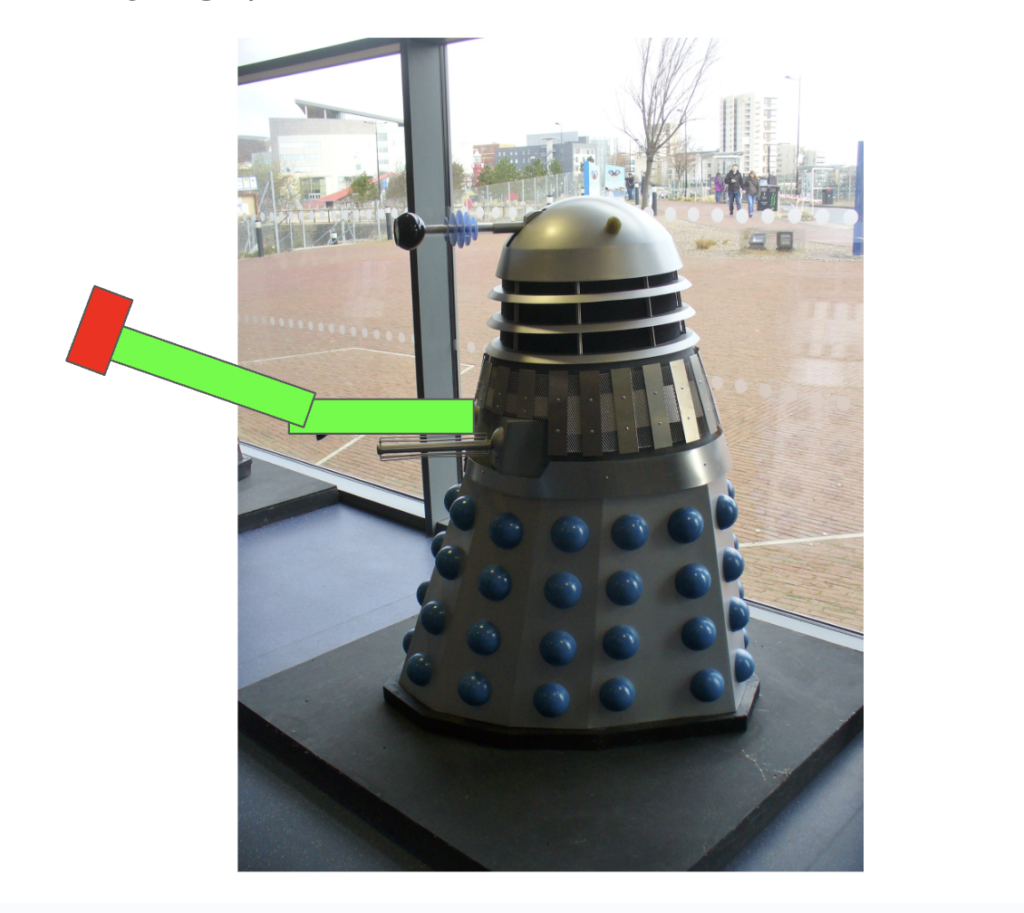
Some possible platform designs:
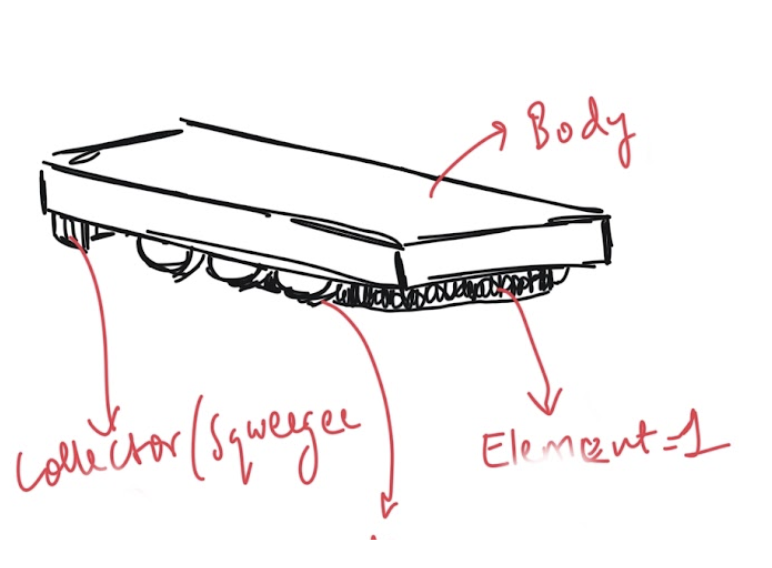
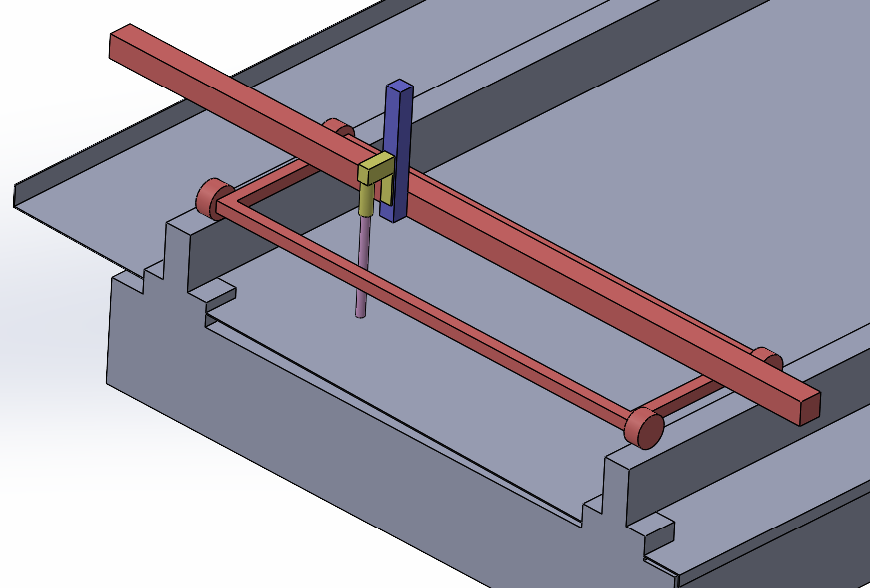
Some initial designs for the chosen platform:
Drawings, Schematics and Datasheets
Electrical:
PCB Schematics, Layout and BOM link
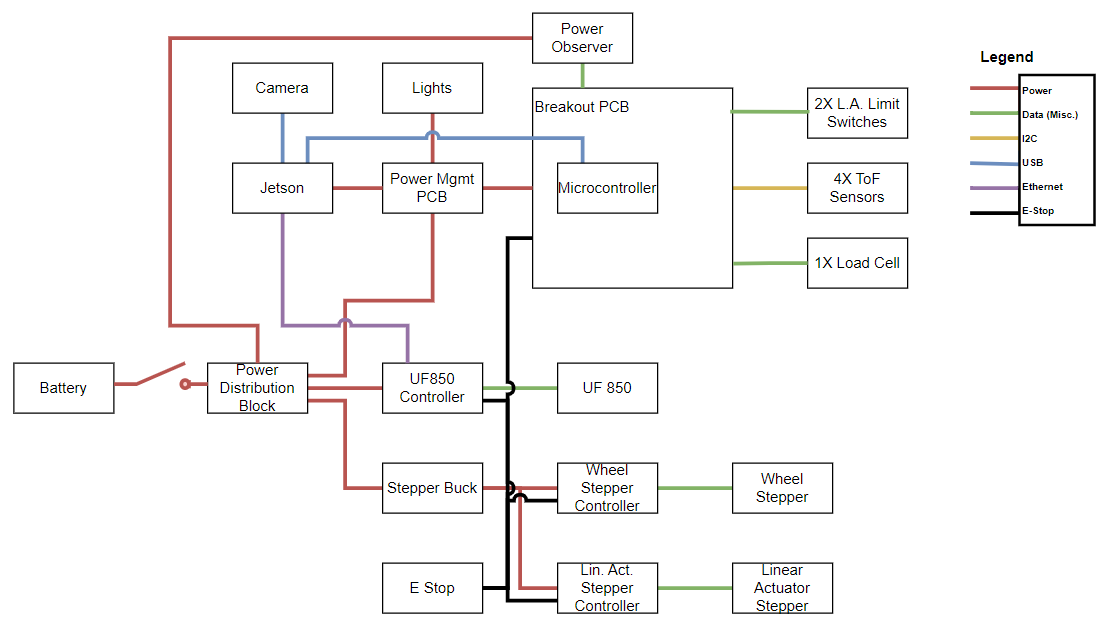
Wiring:
Key datasheets:
Other components used (e.g. diodes) are so common that there is no need to store their datasheets here.
Mechanical:
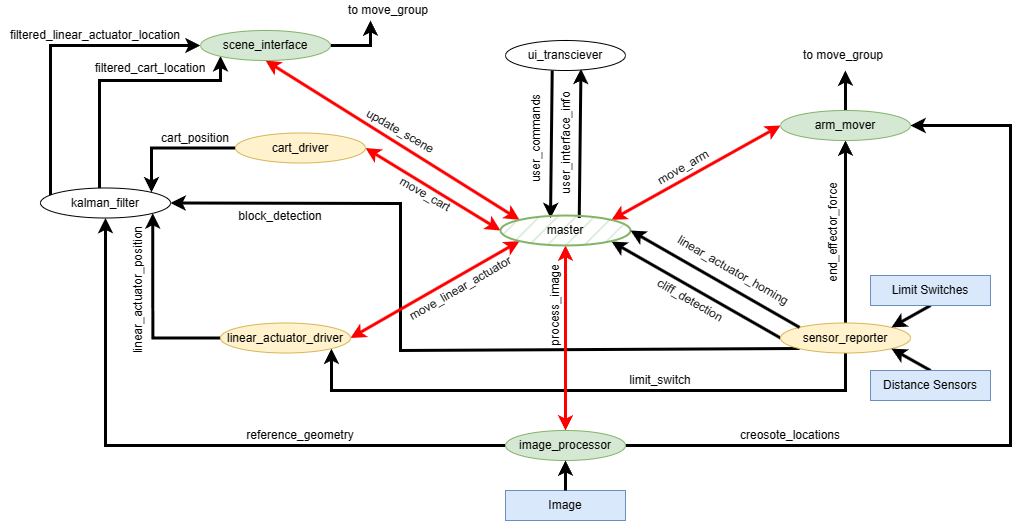
Software flowchart:
Component Testing & Experiment Results
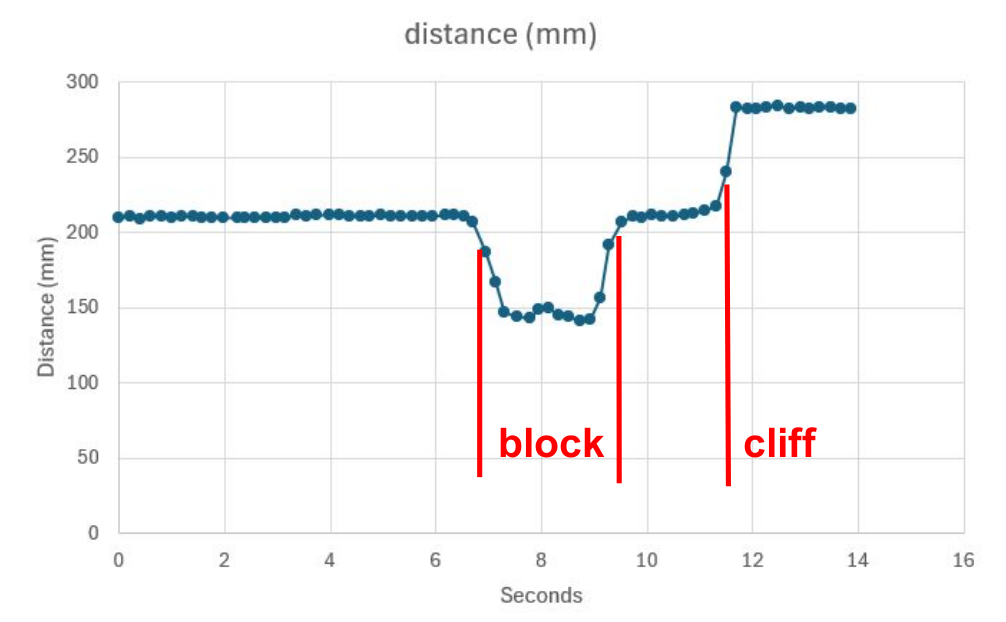
Testing on the cliff sensor was necessary to find the detection thresholds that would trigger the platform’s break protocol. This also allowed us to see how the sensor would react to blocks. We commanded the platform to move with a constant velocity on a section of the rails and recorded the values read by the cliff sensors, reproduced below:
Software
Our software is stored on github as several repositories. READMEs and usage instructions can be found in the repositories themselves.
List of repositories:
- ROS2 code for planning and controlling the arm: https://github.com/KoppersCreoClean/koppers_ros2
- Perception code for detecting and segmenting creosote: https://github.com/KoppersCreoClean/perception
Presentations
Individual Lab Reports (ILRs):
- Yatarth: ILR01, ILR02, ILR03, ILR04, ILR05, ILR06, ILR07, ILR08, ILR09, ILR10
- Michael: ILR01, ILR02, ILR03, ILR04, ILR05, ILR06, ILR07, ILR08, ILR09, ILR10
- David: ILR01, ILR02, ILR03, ILR04, ILR05, ILR06, ILR07, ILR08, ILR09, ILR10
- Leo: ILR01, ILR02, ILR03, ILR04, ILR05, ILR06, ILR07, ILR08, ILR09, ILR10
- Louis: ILR01, ILR02, ILR03, ILR04, ILR05, ILR06, ILR07, ILR08, ILR09, ILR10
Preliminary Design Review (PDR)