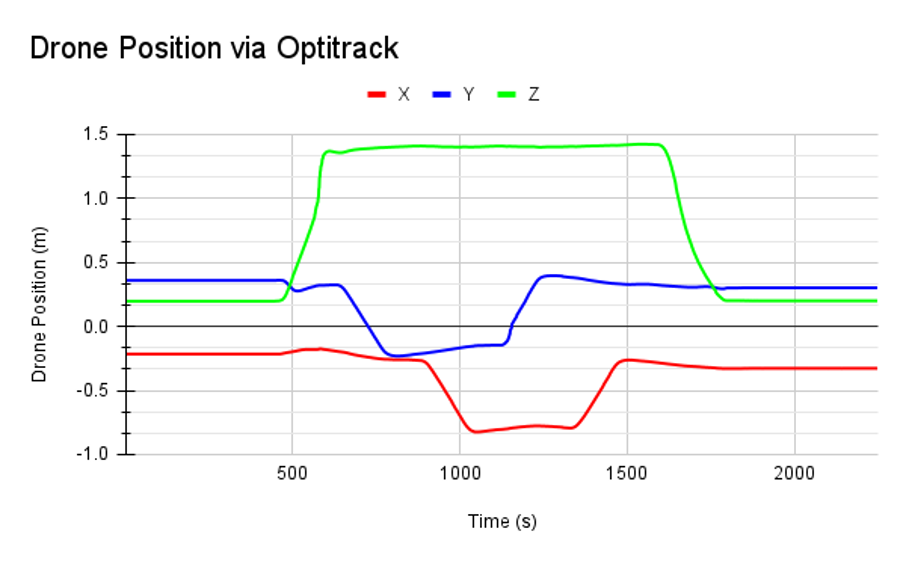
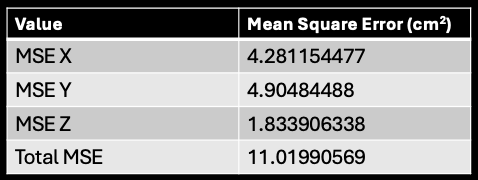
System Performance Key Performance Results for Fall 24: Subsystem Performance Details Drone Control Position of the drone MSE error on each axis and total Motion Capture Video on Youtube Human Following Drone Following Video Avatar Generation Quality Drone Following Video