System Design
System Requirements
| Code | Functional Requirements | Performance Metrics |
| MP1 | Control Avatar | RMSE should be less than 10 cm between the input 3D poses used to control the avatar and the detected 3D poses of the reconstructed avatar. |
| MP2 | Detect and Track the Human | The percentage of frames capturing the Human should be >=95%. |
| MP3 | Estimate Human Joint Poses | RMSE per joint position error ≤ 5 cm on dataset Human3.6M |
| MP4 | Estimate Human Position | Depth Estimation between human and the drone error <= 10 cm |
| MP5 | Plan Trajectories for Drone | The average distance between the drone with ego human and obstacle should be between 2 m to 4 m and 1.5 m to 2 m respectively |
| MP6 | Control Drone | MSE between drone’s actual positions and the predefined waypoints <= 25 cm^2 |
| MP7 | Avatar Realtime Rendering | The rendered avatar should have 30 FPS |
| Code | Non-Functional Requirements |
| MN1 | The UAV must operate with minimal noise to avoid disruption and ensure a comfortable user environment. |
| MN2 | The flight time of the UAV must be long enough to cover a short conversation. |
| MN3 | The system will have both hardware and software safety measures. |
| MN4 | The system will be documented and prepared to be handed off easily to future responsible parties. |
| MN5 | The system must be safe to use around humans and indoor environments. |
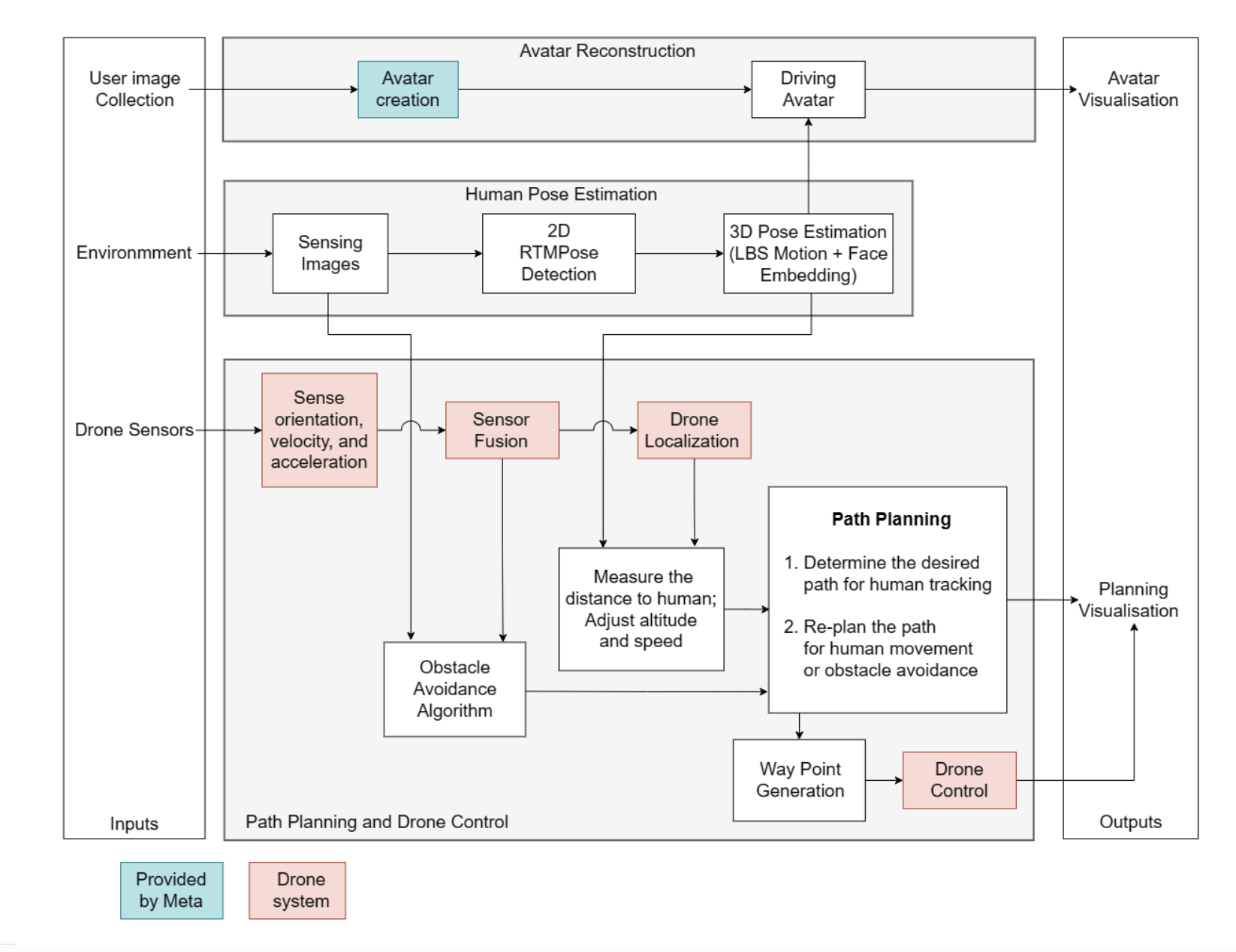
Functional Architecture
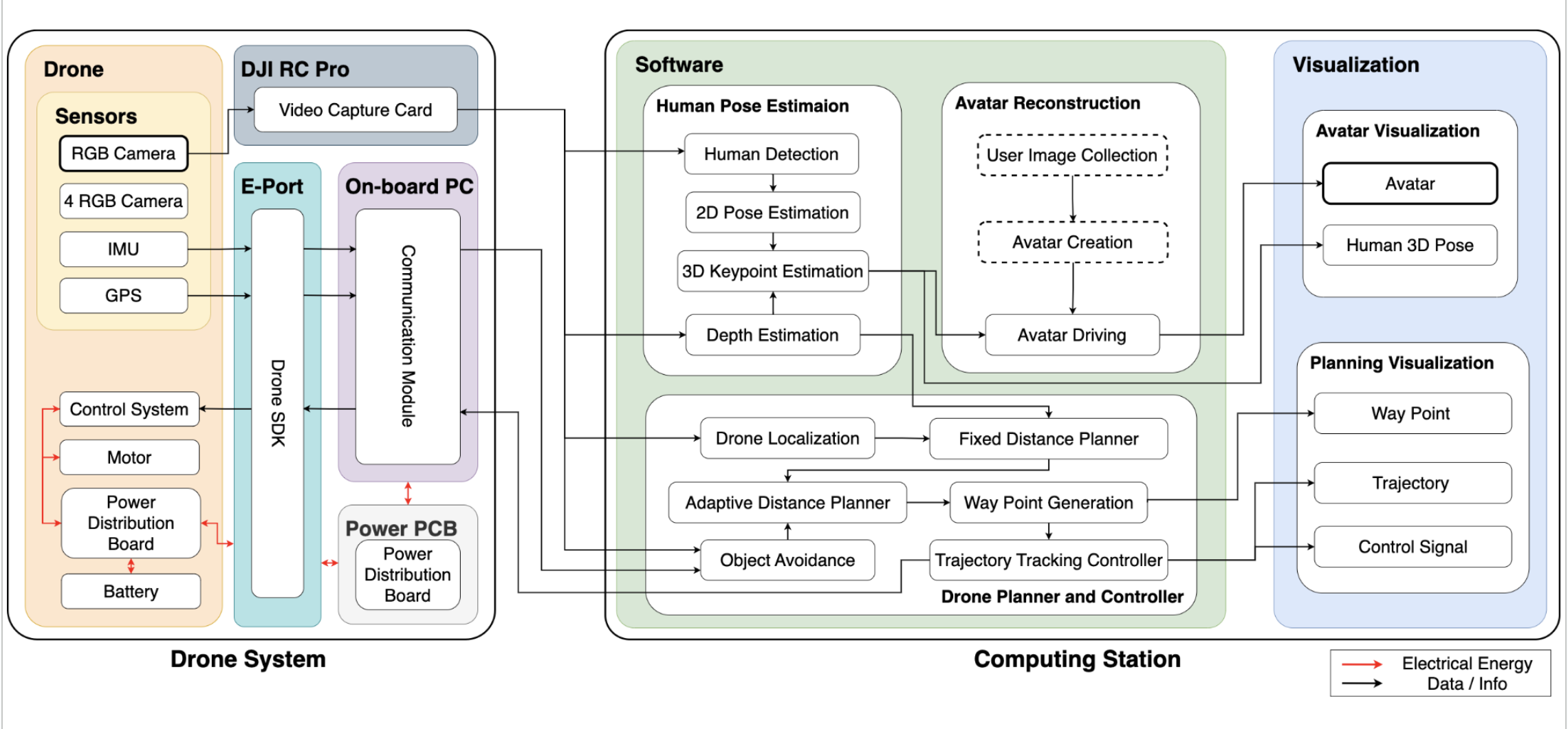
Cyberphysical Architecture