Identifies locations over an area of 10 acres with 1 m precision.
MF2
Optimizes planting paths.
Plants an average of 1 tree per minute for 30 minutes.
MF3
Traverses pastureland.
Able to traverse 30-degree slopes.
MF4
Avoids collisions.
Minimum run-time of 10 hours with a collision.
MF5
Deposits Seedlings.
Plants 80 % of seedlings properly based on forestry standards.
MF6
Accommodates for variety of seedlings.
Operates with seedling heights of 12-38 cm (5-15 in)
MF7
Updates users with clear information.
Returns map of planting locations to user every 30 minutes.
Non Functional Requirements
No.
Requirement
MN1
Cost-effective.
MN2
Rugged
MN3
Easy to use.
MN3
Safe
Desirable Function / Performance Requirements
No.
Requirement
DP1
Plants 95% of seedlings properly according to forestry standards
DP2
Plants average of 2 trees per minute per 30 minutes.
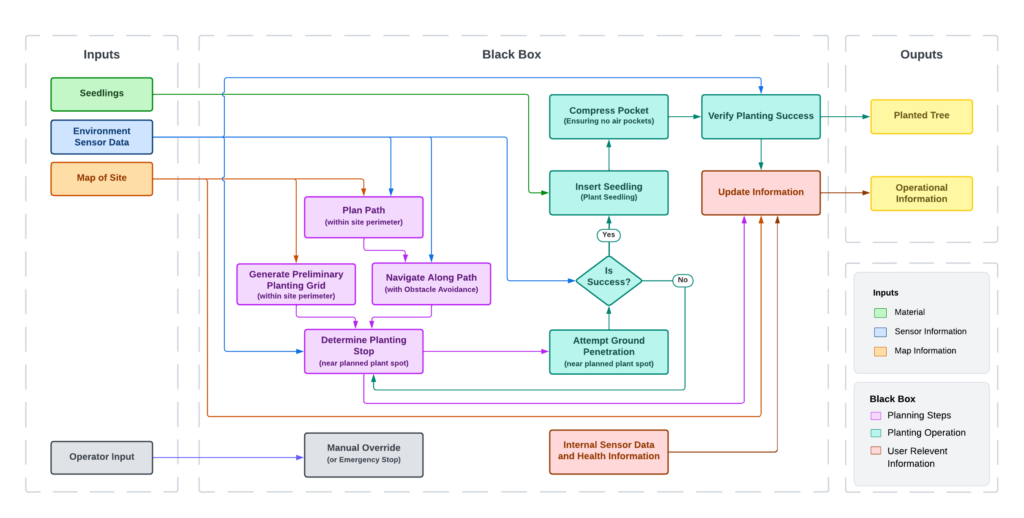
Functional Architecture
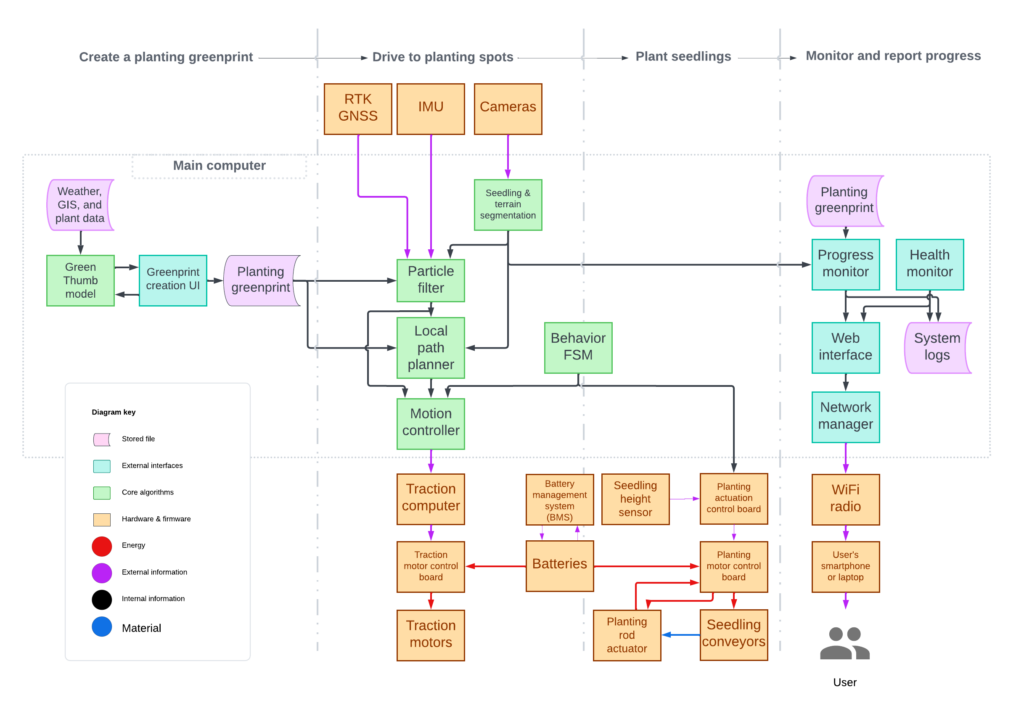
Cyber-physical Architecture
System Design Description
Our system will be mounted on the Clearpath Warthog. It has its own computer and battery pack, where we will utilize an additional computer and battery system to interface with our planting mechanism and various sensors (provided by Kantor Lab). Regarding sensors, the Steward will be equipped with two RGBD cameras, a RK-GNSS, IMU, and proximity sensors. The planting mechanism will utilize four motors. The ideal system would also have a dedicated seedling storage and distribution platform to send to the planting mechanism, but this will be a stretch goal and isn’t part of the scope for our project at this time. We don’t have a fully integrated model at this time, so please entertain yourselves with these pictures: