On this page, you’ll see our project plans. MRSD has a strong focus on both systems engineering and project management. This ensure that graduates are well-rounded engineers capable of delivering real-world solutions.
We have suceesfully achieved all our capability milestone for spring semester in the time frame mentioned below. The figure below lists all the Capability Milestones of Spring Semester
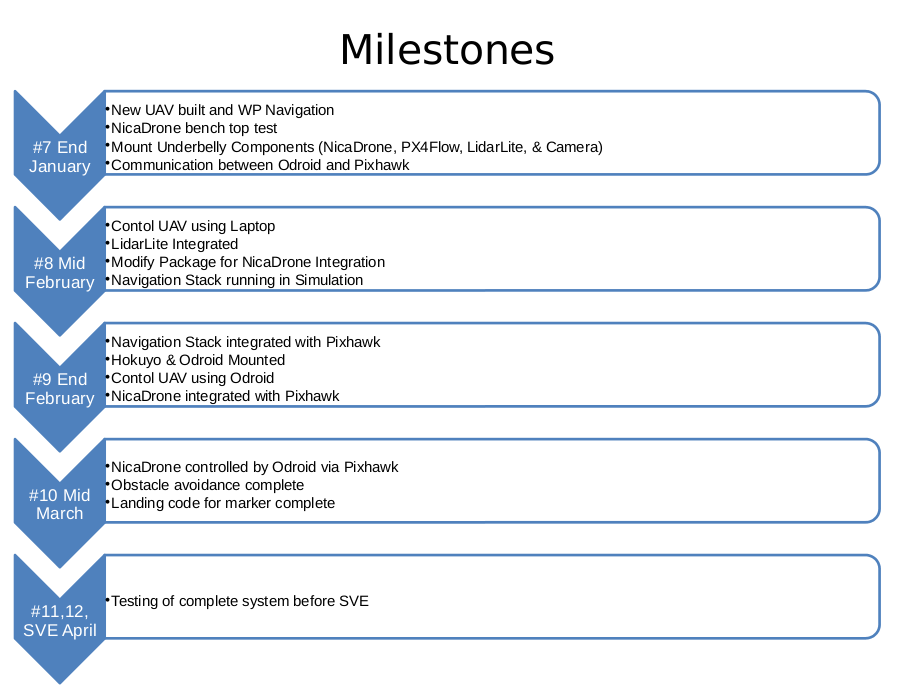
Capability Milestone schedule for Spring Semester
Spring Semester Schedule
Current Status: ACHIEVED ALL MILESTONE. SVE & SVE ENCORE DEMO SUCCESSFUL
Presentation Round-Robin Order:
- Sean (PR 7, 10)
- Pratik (PR 8, 11)
- Tushar (PR 9, 12)
b. Test plan
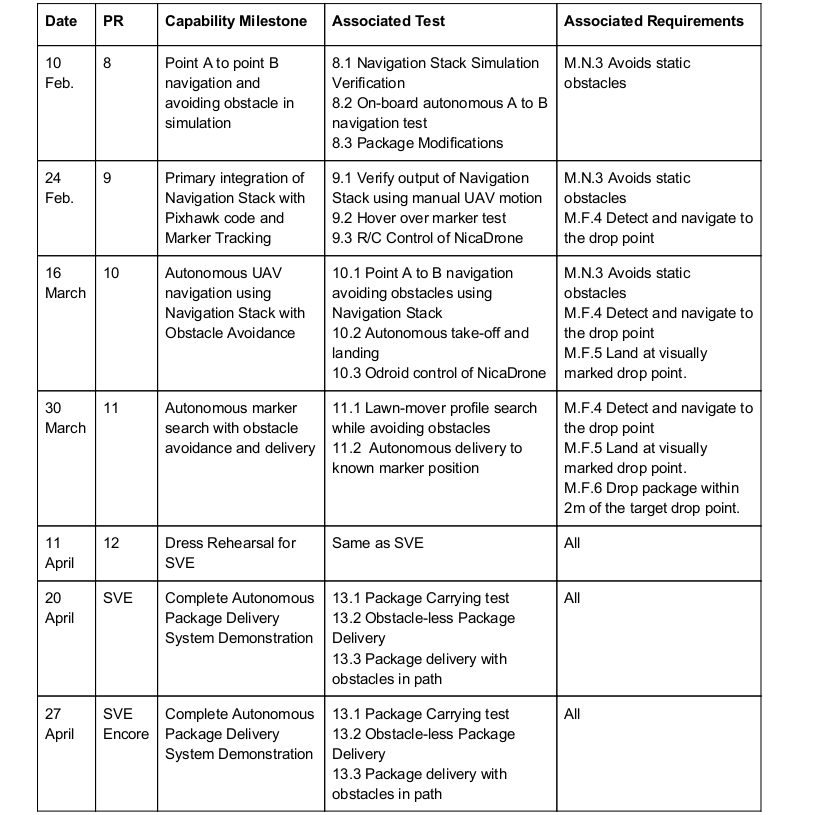
We have successfully achieved the test plan requirements for SVE & SVE encore tests. The following schedule describes the capability milestone and associated tests that were demonstrated during each of the Progress Review.
Fall Validation
Fall Validation, Test A
| Test ID | A | |
| Test Name | Real time vision test | |
| Test Description | Validates a working embedded vision system which can detect and track visual markers in real time | |
| Equipment Required | Vision microprocessor and Camera system set up on a table, Visual Markers | |
| Step | Step Description | Success condition |
| A.1 | Attach visual marker to a wall in view of the camera | |
| A.2 | Initiate program | Marker should be detected and demarcated using computer vision |
| A.3 | Move the visual marker either direction in X and Y while in camera view | Marker position should dynamically update |
Fall Validation, Test B
| Test ID | B | |
| Test Name | Package carrying mechanism test | |
| Test Description | Validates the package carrying and dropping capabilities of the UAV | |
| Equipment Required | UAV fitted with the package carrying mechanism, Small package. | |
| Step | Step Description | Success condition |
| B.1 | Place the UAV with the package attached to the carrying mechanism | |
| B.2 | Initiate take off manually | |
| B.3 | UAV lifts off and hovers 5m over the ground for 1 minute | The package remains securely attached to the UAV |
| B.4 | UAV descends and lands | Package still attached |
| B.5 | UAV drops package onto the ground | Package is released and lands on the ground |
Fall Validation, Test C
| Test ID | C | |
| Test Name | UAV navigation test | |
| Test Description | Validates the flight control and navigation of the UAV (GPS allowed) | |
| Equipment Required | UAV, Laptop for waypoint control. | |
| Step | Step Description | Success condition |
| C.1 | Place UAV on the ground. Assign waypoints for the UAV to cover | |
| C.2 | UAV takes off and flies to the first waypoint | The UAV takes off smoothly and maneuvers to the waypoint |
| C.3 | UAV goes from waypoint to waypoint as instructed | All waypoints are reached using a direct path and with a maximum error of 3m. |
| C.4 | UAV returns to staring waypoint and lands | Final UAV position is within 5m of the starting UAV position |
Fall Validation, Test D
| Test ID | D | |
| Test Name | Static obstacle detection test | |
| Test Description | Validates that static obstacles are detected at least in one direction accurately | |
| Equipment Required | Desk, Proximity sensing system communicating to the flight controller, two sizes of obstacles (can be boards with cross sections 1.5×0.5m and 2x2m) | |
| Step | Step Description | Success condition |
| D.1 | Setup desk with proximity sensor and controller system | |
| D.2 | Initiate system with configurations | The UAV takes off smoothly and maneuvers to the waypoint |
| D.3 | Bring 2mx2m obstacle in front of the system | Obstacle is detected in a range of 50cm to 1.5m from the system and distance is identified with a maximum error of 20 cm. |
| D.4 | Bring 1.5mx0.5m obstacle in front of the system | Obstacle is detected in a range of 50cm to 1.5m from the system and distance is identified with a maximum error of 20 cm. |
Spring Validation (Updated April 1, 2016)
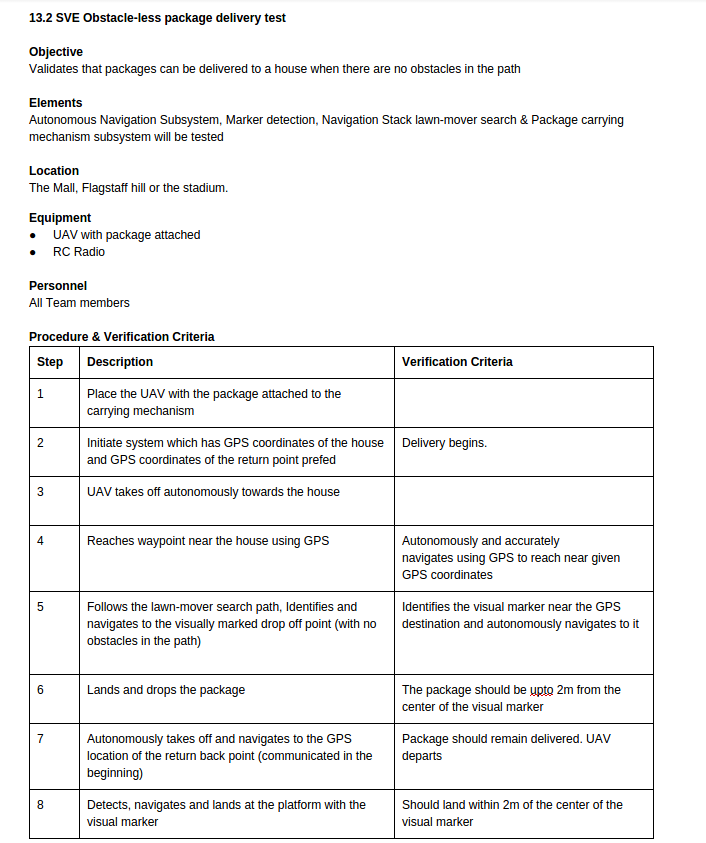
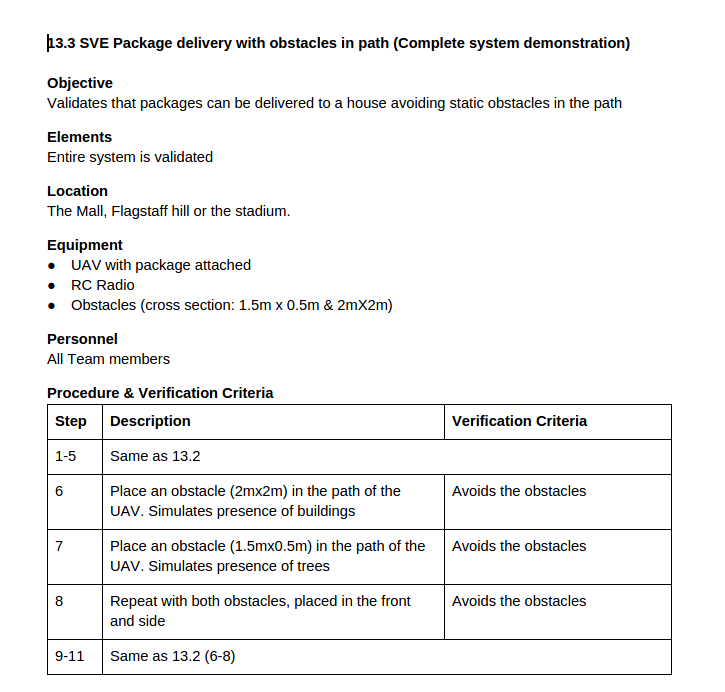
Below mentioned are the two tests for the Spring Validation Experiment. These are complete flight tests with and without obstacles.
A copy of the plan can be found here: Team A SVE
Test Obstacle-less package delivery test
Test – Complete Package delivery test with obstacles
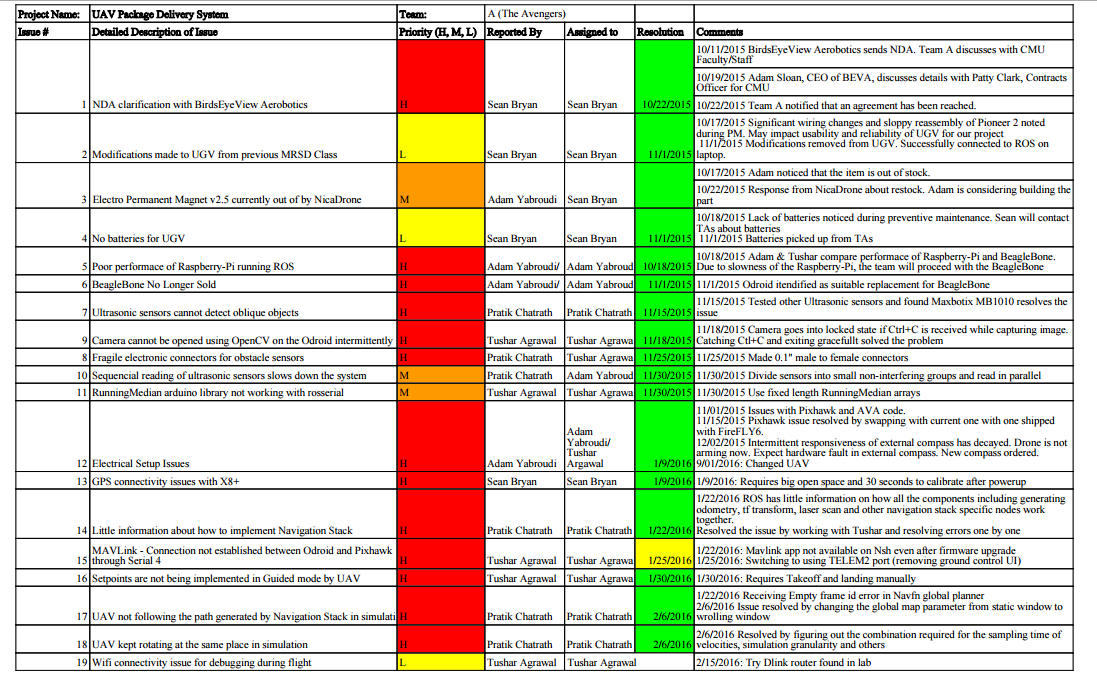
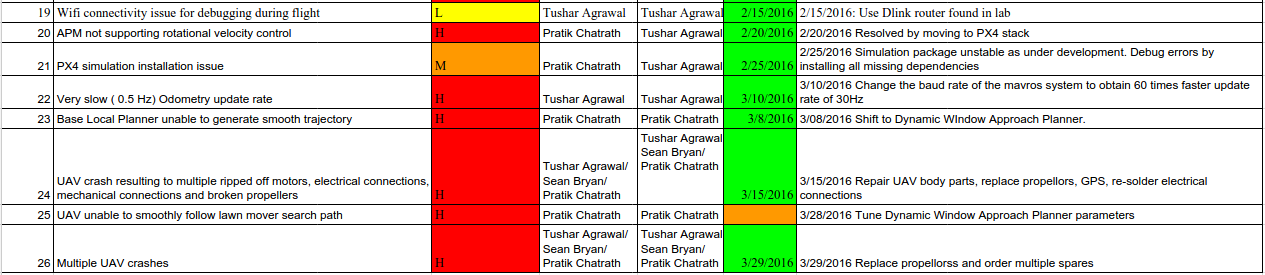
c. Issues log
d. Parts list
Research and Development Part List:
| S.No. | Item (Spare Parts) | Quantity |
| 1 | FireFly6 Pro Combo | 1 |
| Px4hawk set (gps, radio, and pixhawk) | 1 | |
| High efficiency propulsion bundle (6 Motors) | 1 | |
| 10×4.5 CCW props | 1 | |
| 10×4.5 CW props | 1 | |
| Adapter ring | 1 | |
| 1 6s BEC | 1 | |
| Turnigy Multistar High Capacity 3S 5200mah | 4 | |
| FrSky Taranis, Spektrum DX9, Futaba 14SG radios | 1 | |
| 2 | Extra Pixhawk (with accessories) | 1 |
| 3 | PIX4FLOW kit (optical flow) | 1 |
| 4 | Nica Drone Electro Permanent Magnet | 2 |
| 5 | BeagleBoard-xM | 1 |
| 6 | Odroid XU4 (with accessories) | 2 |
| 7 | Camera(Logitech C270) | 1 |
| 8 | MaxBotix Ultrasonic Rangefinder | 14 |
| 9 | Sharp IR sensors | 5 |
| 10 | Hakuyo URG lidar | 1 |
| 11 | Lidar-Lite v2 | 1 |
| 12 | 3DR X8+ | 1 |
| X8 10000mAh Battery pack | 1 | |
| Sunnysky V2216-12 800KV Brushless Motor | 4 | |
| APC 11×4.7″ CW/CCW Propeller Prop Set | 1 | |
| X8+ Landing Gear | 2 | |
| Gps Module For Pixhawk & Apm 2.6 | 1 | |
| 15 | Playstation Eye webcam | 1 |
| 16 | Odroid XU expansion board | 1 |
Current System Part List:
| S.No. | Item (Spare Parts) | Quantity |
| 1 | 3DR X8+ | 1 |
| X8 10000mAh Battery pack | 1 | |
| Sunnysky V2216-12 800KV Brushless Motor | 4 | |
| APC 11×4.7″ CW/CCW Propeller Prop Set | 1 | |
| X8+ Landing Gear | 2 | |
| Gps Module For Pixhawk & Apm 2.6 | 1 | |
| 2 | Nica Drone Electro Permanent Magnet | 2 |
| 3 | Odroid XU4 (with accessories) | 2 |
| 4 | Camera(Logitech C270) | 1 |
| 5 | Hakuyo URG lidar | 1 |
| 6 | Lidar-Lite v2 | 1 |
| 7 | Odroid XU expansion board | 1 |
e. Budget
| Item | Quantity | Price/Unit | Price |
| Electro Mechanical System | |||
| Firefly 6 UAV | |||
| Firefly: High- Efficiency Propulsion Motors Bundle | $600.00 | ||
| Propeller adapter ring | 1 | $3.50 | $3.50 |
| 10×4.5 CW props | 5 | $3.00 | $15.00 |
| 10×4.5 CCW props | 5 | $3.00 | $15.00 |
| Firefly 6 spare motors | 2 | $102.00 | $204.00 |
| Firefly 6 spare batteries | 4 | $17.00 | $68.00 |
| 3DR X8+ | |||
| X8+ UAV set | 1 | $599.00 | $599.00 |
| X8 spare battery | 1 | $65.00 | $65.00 |
| APC 11×4.7″ CW/CCW Propeller Prop Set | 2 | $11.49 | $22.98 |
| Spare motors (set of 4) | 1 | $119.98 | $119.98 |
| Spare ESCs | 1 | $22.94 | $22.94 |
| X8+ Landing Gear | 2 | $4.00 | $8.00 |
| 3d Robotics GPS-KIT-0003 Gps Module For Pixhawk & Apm 2.6 | 1 | $89.99 | $89.99 |
| GPS Mast | 1 | $5.00 | $5.00 |
| Sunnysky V2216-12 800KV Brushless Motor | 4 | $25.95 | $103.80 |
| 3DR X8+ Main Body | 1 | $34.99 | $34.99 |
| Safety Switch for PX4/Pixhawk | 1 | $8.00 | $8.00 |
| Spare Electronics | |||
| Px4hawk set (gps, radio, and pixhawk) | 1 | $230.00 | $230.00 |
| 1 6s BEC | 1 | $39.00 | $39.00 |
| BEV ppm | 1 | $10.00 | $10.00 |
| Duracell Procell AA 24 Pack | 1 | $10.06 | $10.06 |
| Servo extension wires | 1 | $13.00 | $13.00 |
| Extra pixhawk | 1 | $200.00 | $200.00 |
| PPM encoder | 1 | $25.00 | $25.00 |
| Gripper | |||
| Nica Drone Electro Permanent Magnet | 2 | $52.00 | $104.00 |
| Pioneer UGV | $0.00 | ||
| Subtotal: | $2,616.24 | ||
| Vision System | |||
| Logitech c270 webcam | 1 | $22.95 | $22.95 |
| Playstation Eye webcam | 1 | $6.98 | $6.98 |
| Odroid | 2 | $83.00 | $166.00 |
| Odroid accessories | 1 | $34.00 | $34.00 |
| Odroid XU expansion board | 1 | $19.95 | $19.95 |
| PIX4FLOW kit (optical flow) | 1 | $150.00 | $150.00 |
| SD cards | 1 | $23.00 | $23.00 |
| Subtotal: | $422.88 | ||
| Obstacle Avoidance System | |||
| Lidar-Lite v2 | 1 | $115.00 | $115.00 |
| MaxBotix Ultrasonic Rangefinder | 20 | $22.00 | $440.00 |
| IR sensors | 0 | $15.00 | $0.00 |
| Hokuyo Lidar | $0.00 | ||
| Subtotal: | $555.00 | ||
| Test Environment | |||
| 2in x 6in x 10ft | 2 | $5.80 | $11.60 |
| 2in x 4in x 8ft | 11 | $1.98 | $21.78 |
| 2″ x 10 ft PVC Pipe | 4 | $7.49 | $29.96 |
| 2″ Couplings | 4 | $0.98 | $3.92 |
| 8ft x 20 ft Tarp | 2 | $25.18 | $50.36 |
| Rope | 2 | $6.27 | $12.54 |
| Rope Cleat | 2 | $1.78 | $3.56 |
| Rope Pulley | 8 | $2.95 | $23.60 |
| Carabineer | 4 | $0.98 | $3.92 |
| Screw Hooks (25 pack) | 1 | $6.50 | $6.50 |
| Subtotal: | $167.74 | ||
| Reimbursement | |||
| Sean — wood/home depot | $13.00 | ||
| Adam — amazon connectors | $7.00 | ||
| Subtotal | $20.00 | ||
| Total: | $3,781.86 | ||