Emlid Reach GPS RTK
Goal:
Test repeatability of GPS RTK waypoints
Setup:
Distributed 4 markers along field by Doherty apartments
RTK base station (GrudsBase) on grass by road entering parking lot, high ground away from trees. Antenna ground plane on tripod, electronics on ground and connected to tripod away from antenna
Methods:
Walked between waypoints
At each waypoint, GrudsRover was placed on ground touching marker
ReachView survey app ‘collect’ initiated at each marker
Allowed to acquire for ten seconds per data point
Collected 40 data points total over the 4 markers
Analysis:
Point 1: 2.96944755848 feet average between points
Point 2: 3.16986453992 feet average between points
Point 3: 4.08993914374 feet average between points
Point 4: 4.49758442594 feet average between points
This squeaks by for our requirements for the Fall Validation Experiment, but not the results we were hoping for with our GPS RTK system. We are looking in to upgrading our GPS antennae to increase accuracy.
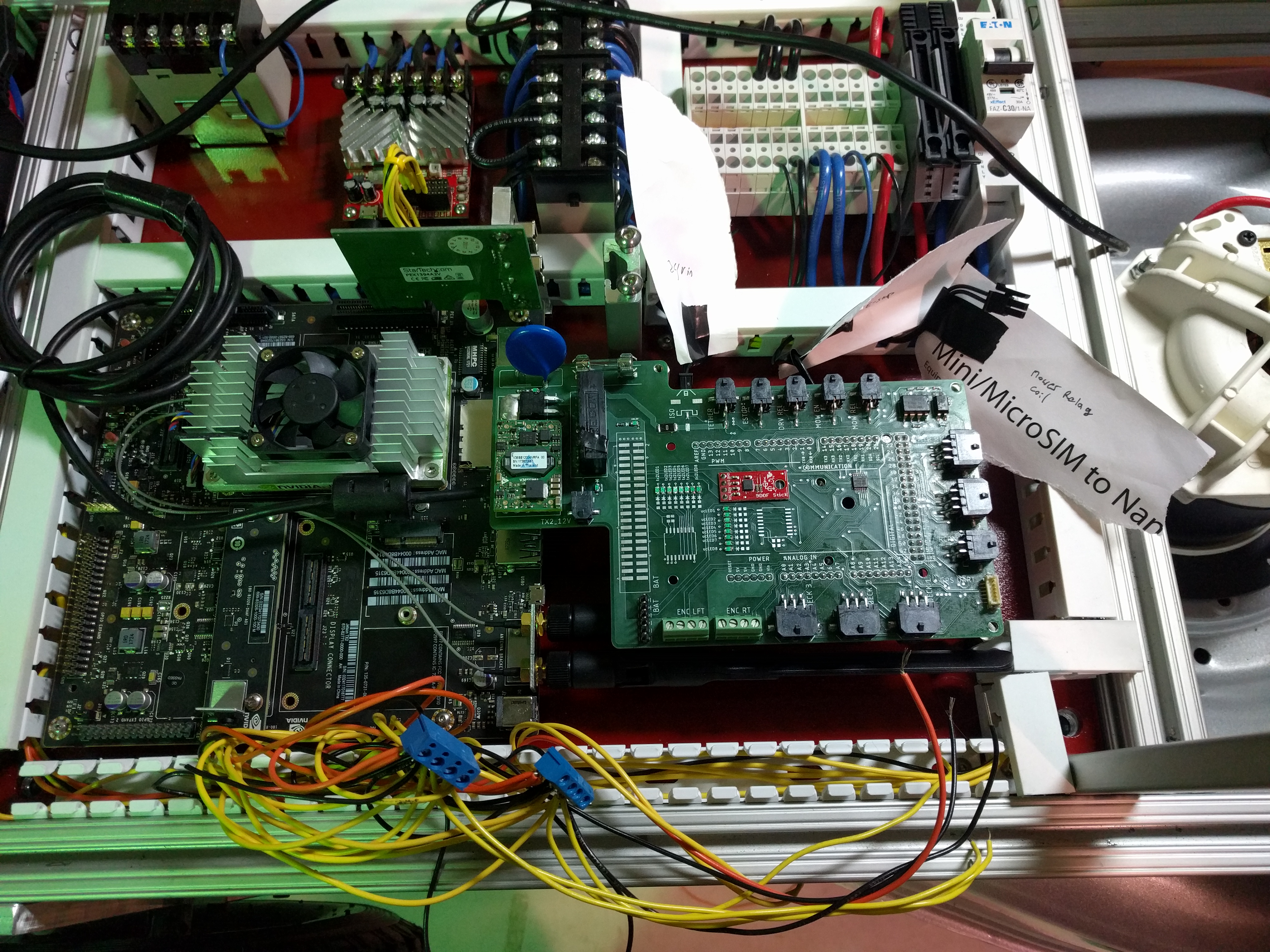
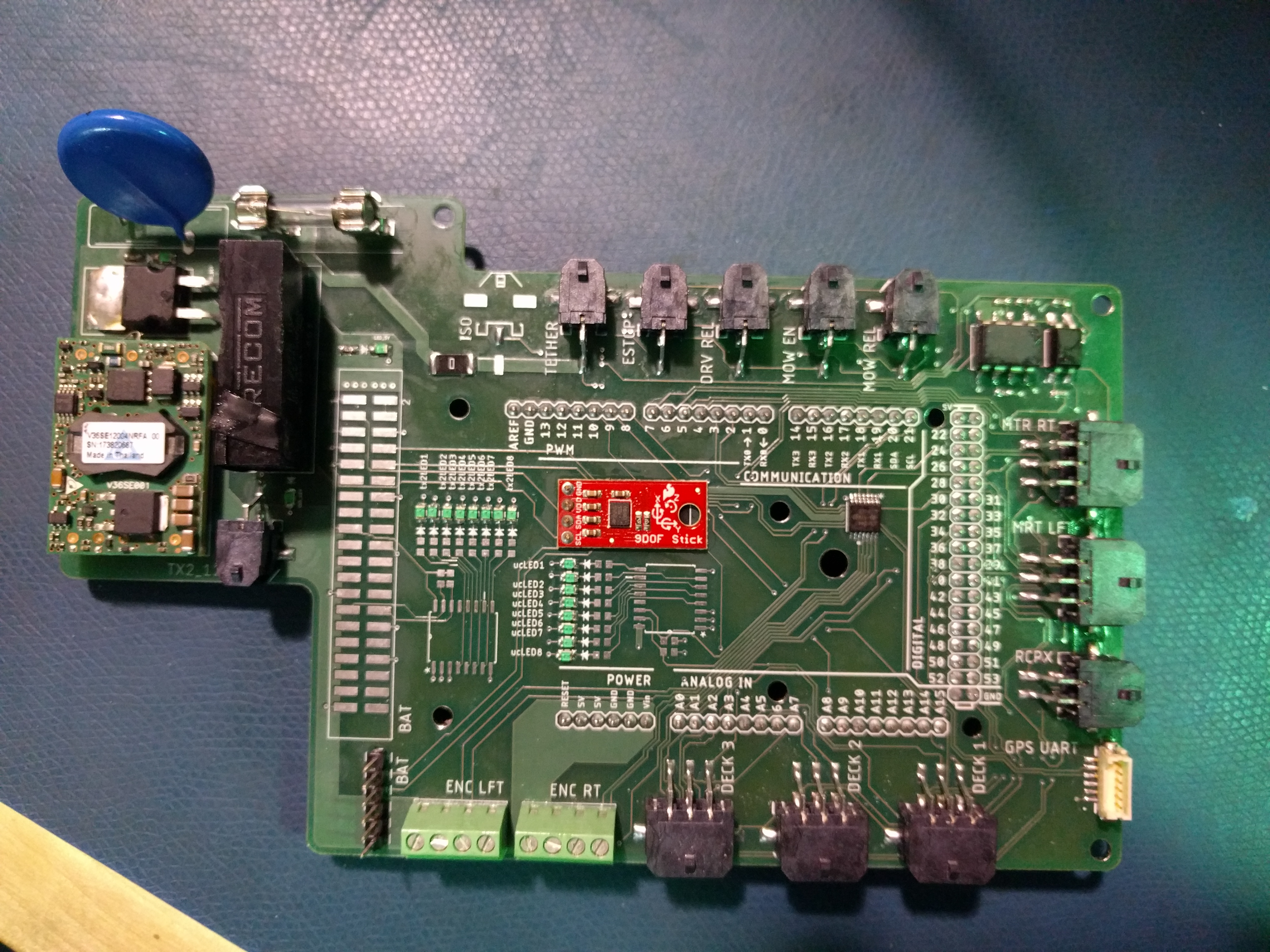
Power Distribution / Integration PCBA Bringup
GroundsBot recently received version 1 Power Distribution and Integration PCB. The PCB was promptly populated and tested.
Power supply testing
Step 1 was testing the 12V and 5V power supply rails. Out of the gate, we had an enable line pulled low on the 5V supply (data sheet listed as active low enable… it is not an active low enable). The power supply was modified, and now both supplies are operational.
Under Voltage Lockout
The under voltage lockout comparator output required some rework to add bypass capacitors, and is now working. This subsystem generates an enable for the relay drivers. The system output goes low (disable) when the battery input voltage drops below 20V, and re-enables at approximately 23V.
Remote Control
The remote control subsystem was tested and works out of the box. Success!
Motor Control and Motor Encoder Input
After some pin remapping, an Arduino Mega was installed on our Integration PCB, and our motor control and motor encoder functionality was validated.