When we first had the idea of making CuBi, many topologies and grasping strategies were considered
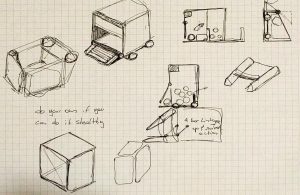
We decided to go for a minimalist concept
We then decided that more functionality was needed and considered additional Degrees of Freedom, by adding a wrist joint and building a semi-manipulator arm with a trunk on CuBi as an interim storage for increased efficiency in collecting objects and reducing total travel time between picking and destination locations.
We considered designs where the manipulator would blend in with the trunk and achieve an inconspicuous cubic form, CuBi…
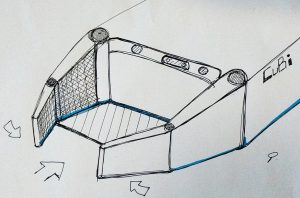
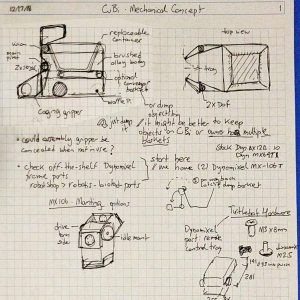
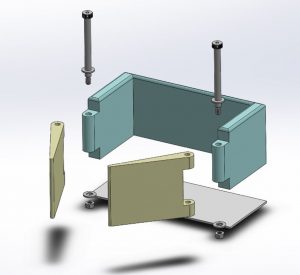
It become clear that the manipulator was the main focus of our design and that many elements of the robot would revolve around it. So this was our first mechanical focus. We envisioned a front tray with two paddles mounted on servo-actuators to bring objects on it.
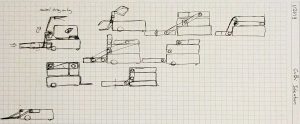
We prototyped a simple version of it to validate its concept. The 3D printing assembly allowed us to see areas for improvement such as the filleted tray base and the overlapping paddles, and overall it was observed that the system is fairly robust and compliant for grasping, since we are using a “caging” grasping strategy.

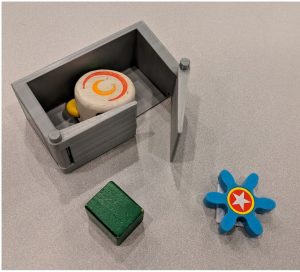
We met with our mentor, Prof.David Held and PhD candidate Thomas Weng and showed them our initial mockup for CuBi’s front tray and object pickup mechanism. Overall, the feedback was very positive and they gave us ideas for further improvements of the mechanism as well as direction for our computer vision and AI strategy. We then moved on to prototyping a servo-actuated manipulator, and to develop our perception algorithms.
