Team D SVD Test: CuBi
Test Procedure:
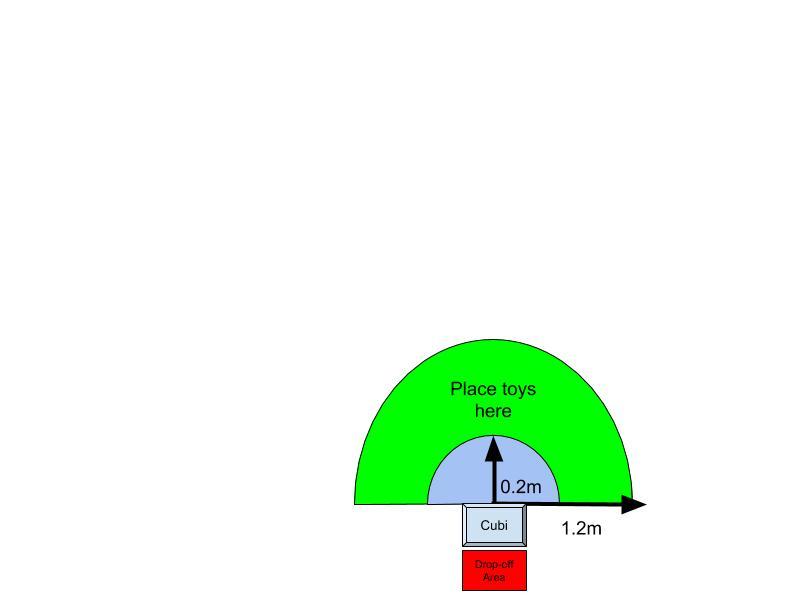
1. Randomly place 5 toys inside the designated area
2. Turn on Cubi.
3. Search for a toy and move towards it.
4. Pick up the toy.
5. Return to the start position.
6. Drop the toy to a designated drop-off location (into a box).
7. Repeat steps 2 to 5 until all toys are picked up.
8. If Cubi fails, we place Cubi at the start location and turn it on again.
Verification Criteria:
Overall Goal:
Pick up 3 toys and drop them to a designated location within 25 minutes.
Secondary Goals:
-
- Detect a toy and calculate its pose relative to Cubi
- Approach a toy within 2 cm
- Pick up one toy on the tray
- Lift the tray (with a toy inside) up from the ground.
- Return to the start position
- Drop a toy in the box
Evaluation Result:
Overall Goal:
Picked up all 5 toys and dropped them into a box within 10 minutes.
Secondary Goals:
All the secondary goals are achieved.
Check out the video of CuBi in action here!
Team D Test Plan – CuBi
Team D FVD – CuBi
Objective:Validate all of CuBi’s subsystems and their integration and to meet all the performance requirements.
Location: Indoor open area near the RI commons on the 4th floor, Newell Simon Hall. It will have obstacles like chairs placed in the area. Area will be closed with walls created by furniture.
Equipment: 6 tennis ball-sized toys, CuBi, any necessary replacements for any major subsystems which are at high risk of breaking, AprilTag
Setup:
- Third party places 6 toys in the designated area and can place obstacles as desired.
- Team CuBi start at the starting location and a box will be placed in the test area.
- CuBi is placed in the designated starting position.
Procedure:
| Step | Description | Performance Measures |
| 1 | CuBi must be able to traverse over carpets with thickness of 12mm or lesser. | |
| 2 | CuBi starts to explore the room and perform SLAM to build a 2D map of the room. | 90% of the reachable area should be mapped by the robot; validated using ground truth |
| 3 | As SLAM is performed, CuBi also uses its perception pipeline to detect objects and classify them as pickable or obstacles and records their rough positions in current map. | Classification error is less than 20% |
| 4 | After building the 2D map, CuBi applies path planning to generate a traversable path through positions of objects, obstacles and drop off location, and achieve the desired poses. | The error should be less than 10% of the desired configuration |
| 5 | CuBi avoids slow-moving and stationary obstacles. | Avoid 75% of the obstacles |
| 6 | CuBi then uses its manipulator to pick up at least two objects off the ground. | Manipulator should pickup within 5 attempts |
| 7 | CuBi should be able to pick most of the toys off the ground. | At least 80% of the toys should be picked up by CuBi |
| 8 | CuBi should be able to drop the clutter into a box at the designated position accurately. | The success rate of dropping should be more than 90%. Error is the difference in euclidean distance between the center of the box and the dropped toy’s location. The threshold for counting as a failed drop is 0.5m |
| 9 | CuBi should be able to clean up 10m² area in a reasonable time. | The time should be within 10 minutes |