Problem Description
Technology has made some very big promises to help people’s lives with home chores and work and so to free up their time for a higher quality of life. Instead, many of us became highly dependent on a technology that absorbs more of our time, without performing any real work or providing practical rewards in return.

Robotics has also made big promises and up to today, other than some really good robotic vacuum cleaners, we believe the sector lacks a real offering of robots that can perform actual physical work to help people’s lives. There has been an attempt to develop social robots, but we believe the real vocation of robots is to perform physical work at the service of and in collaboration with people.
We believe that by focusing on a specific task domain, and using currently available research, technology and hardware, we are able to design, construct and potentially manufacture a robot called CuBi, to liberate people from time consuming technology. The main application we chose to tackle is to declutter a room through the use of an autonomous home robot. This is an ambitious application, and partly explain the current absence in the market of such robot, since it involves the integration of many aspects of robotics, mainly the ability to grasp objects and interact with the physical world.
CuBi will have the ability to collect objects on the ground, such as toys, and take it to a predetermined location such as a box or bin.
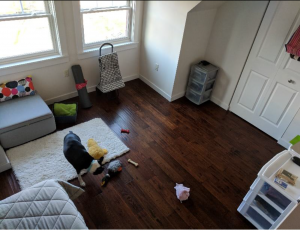
CuBi shall be able to encounter a room in an initial state with clutter, like the one on the left, and work autonomously to achieve the end state on the right. The clean end state is also used as a learning state:

The main goal is for CuBi to help busy parents of small children, pet owners, and daycare facilities with the task to clean up toys from the ground after playtime. A vacuum robot may be deployed after that as it will find a room devoid of extraneous objects and obstacles. Using A Systems Engineering approach to this project and the combination of our team’s engineering skills and experience, we set out to design CuBi for manufacturing, assembly, affordability, reliability and with a very clean and minimalist design, to be part of the home of a large portion of the population. CuBi will be a big help to any home, in a very inconspicuous way.
Below we describe the use case for a day care facility where CuBi would be used intensively, while freeing up educator’s time for more meaningful activities, while empowering kids to clean on their own, along CuBi.
Use Case
Zachary is an early childhood educator in an infant toddler classroom. Most of the children are under one year of age. Ellen, who is under his care, suddenly started crying after dropping a rattle from her hand. As Zachary comforted her, he looked around the room. Over the last hour, the room had become cluttered with a dozen toys. As the children explored the space, the educators were busy with changing diapers, giving bottles, and offering children snacks. Now that all of that is finished, it was time to get the room cleaned up and organized so the morning activities can begin.
Once Ellen stopped crying and was playing peek-a-boo with an educator in the other playroom, Zachary turned on CuBi to perform its work while he gathered the materials needed for the light and shadow exploration. CuBi went around the room, when no babies were around, picking up tennis ball-sized toys from the floor and placed them in the bin at the corner of the room. For 30 minutes, CuBi performed its work without crashing into anything and placed almost all the toys in the bin. Then CuBi went back to its dock to self-recharge for a few hours. Now that the floor was decluttered, Zachary was ready to set up for the light and shadow activity. He was happy to see the clean floor and quickly set up the next experience.