Skip to content
Fall Validation Demonstration
Visualization of exploration
Grasping validation comparison
Grasping validation (success)
Grasping Validation (failed)
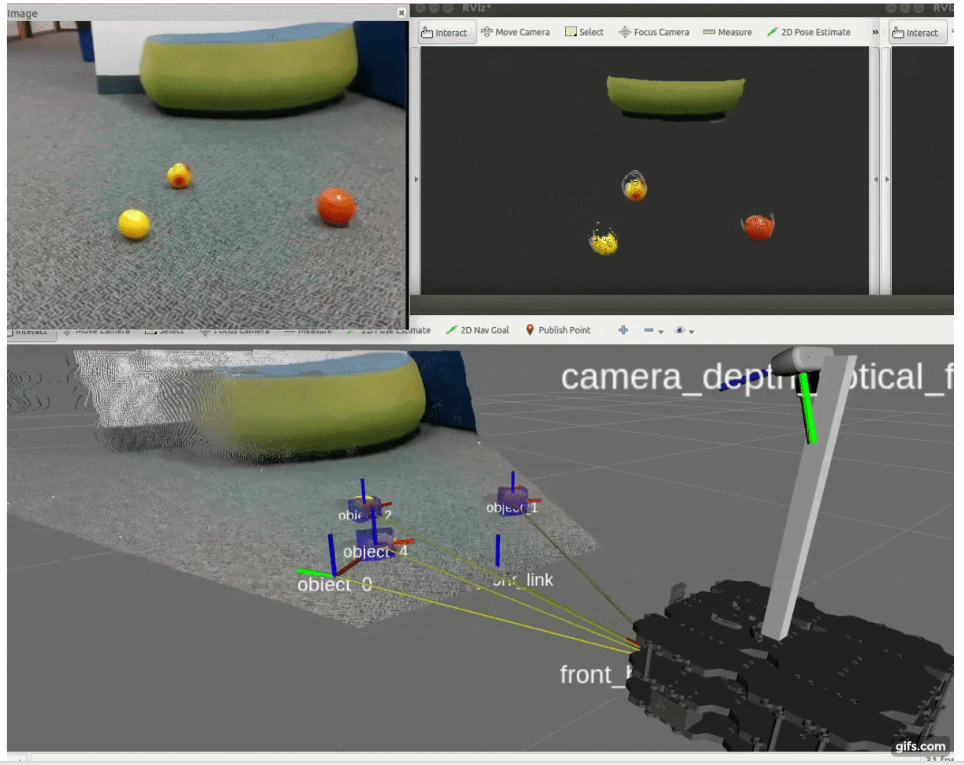
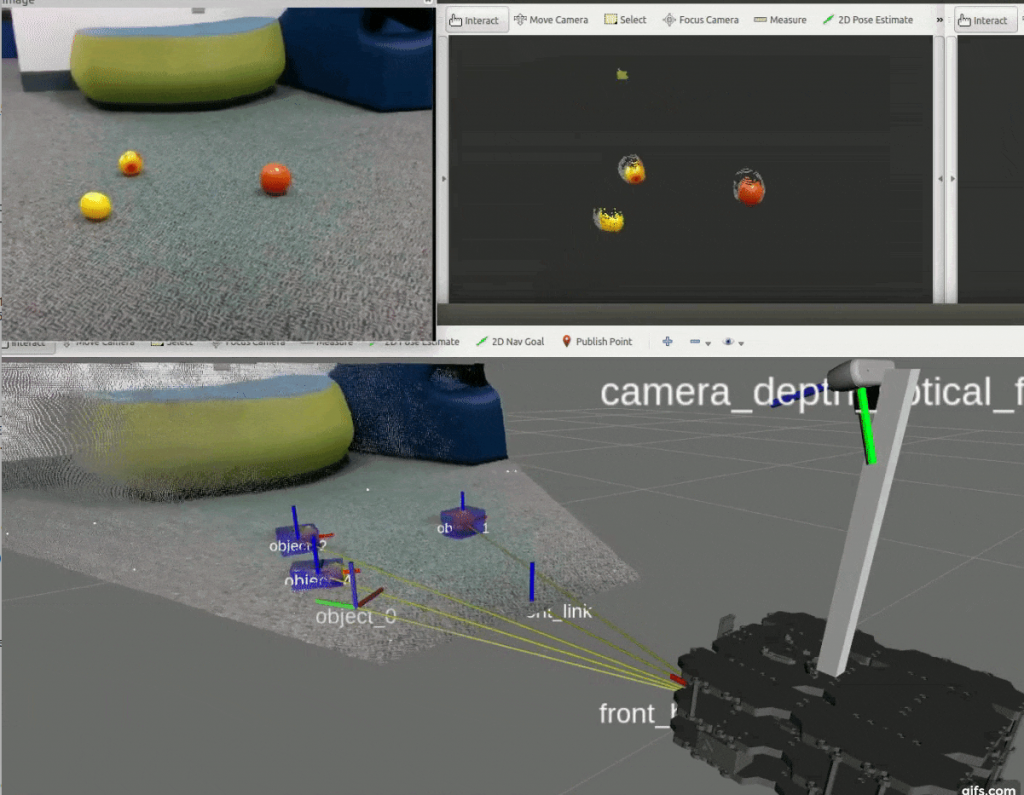
Robust Object Detection
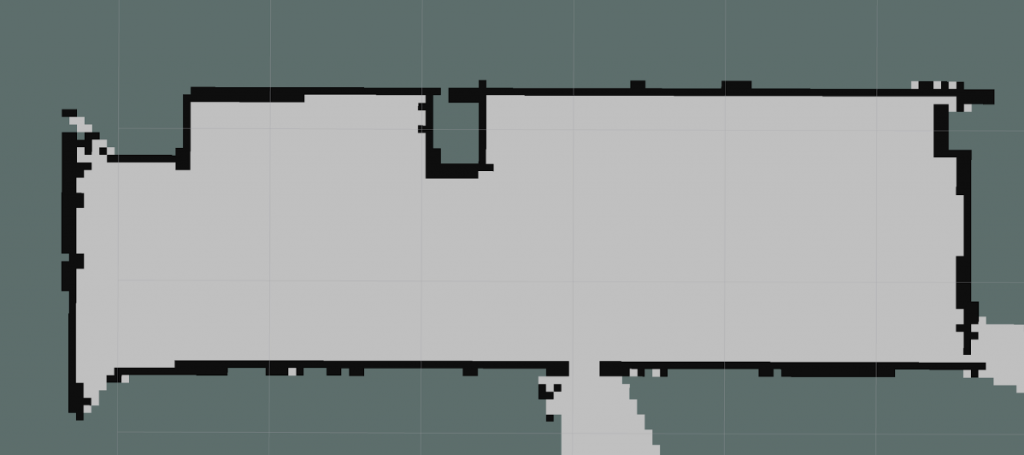
Mapping of the environment
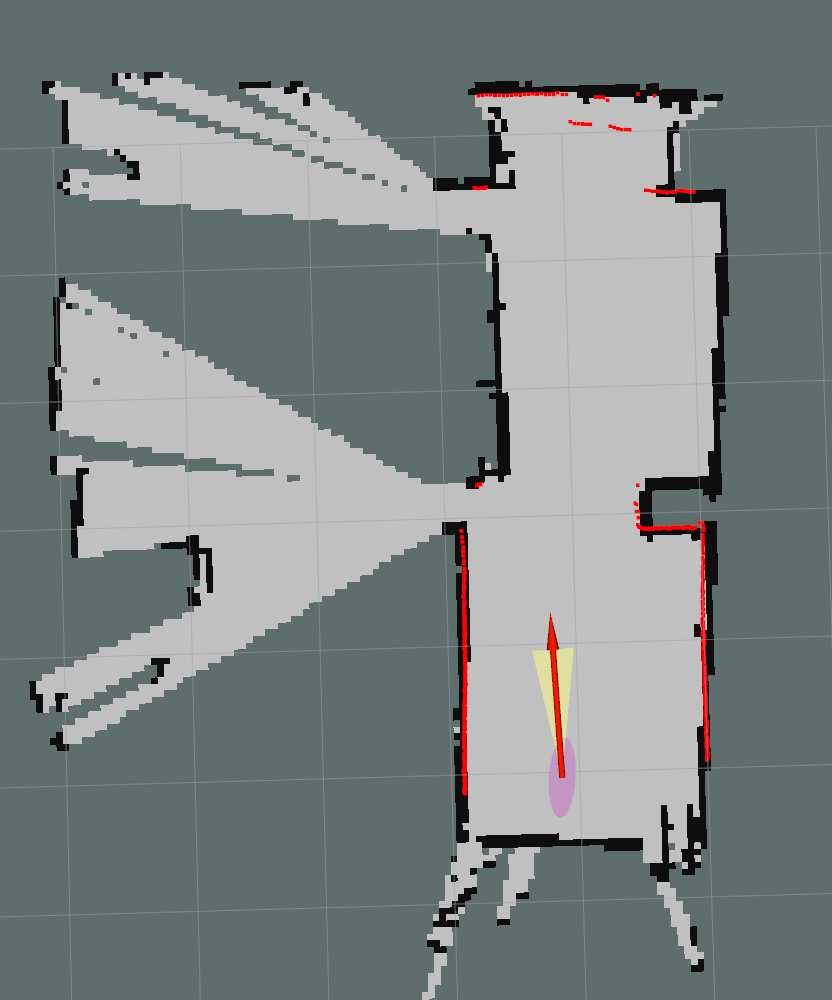
Localization in the map
Exploration in the map
New caster wheel
CuBi demo for its customer : Cyert Center for early education
Team CuBi before Cyert center demo
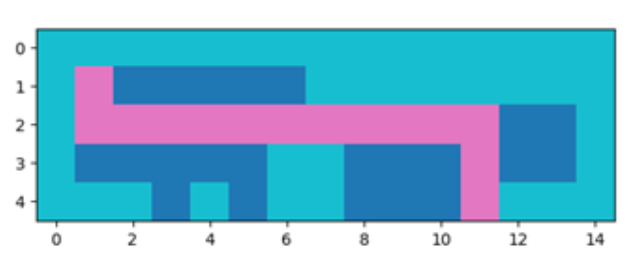
Perception visualization for CuBi
CuBi demo at the RI National Robotics Week Open House
Poster for RI National Robotics Week Open House Demo
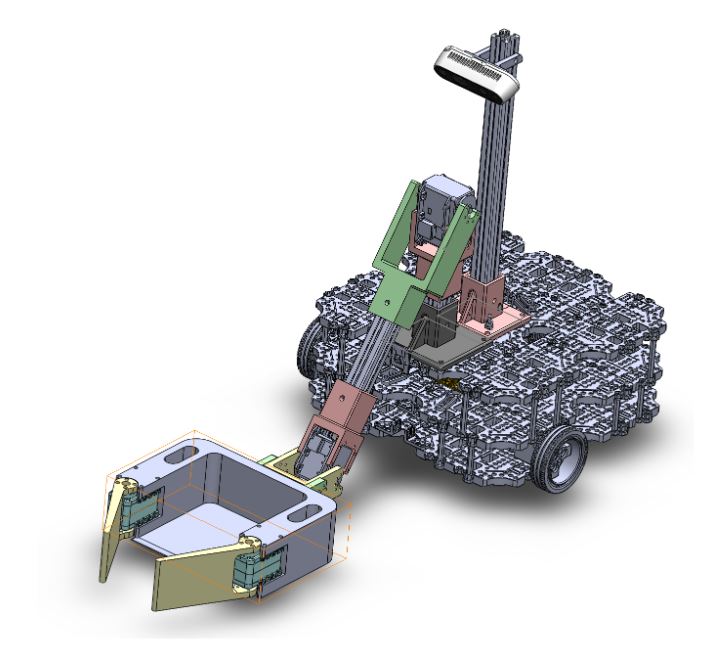
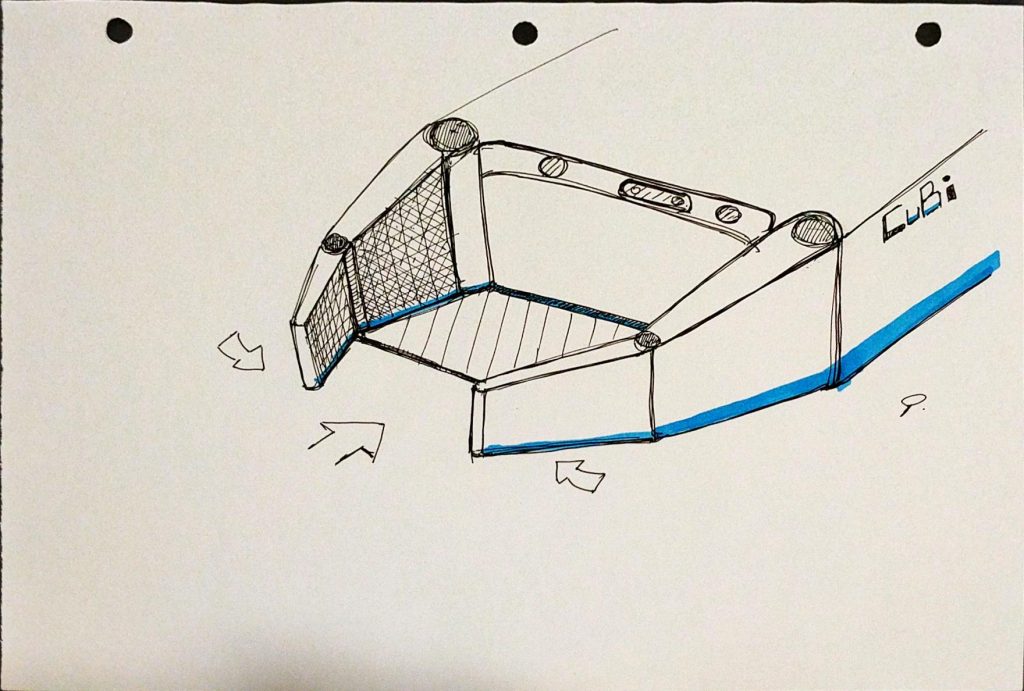
CuBi’s novel design
Final version of CuBi at the end of spring semester
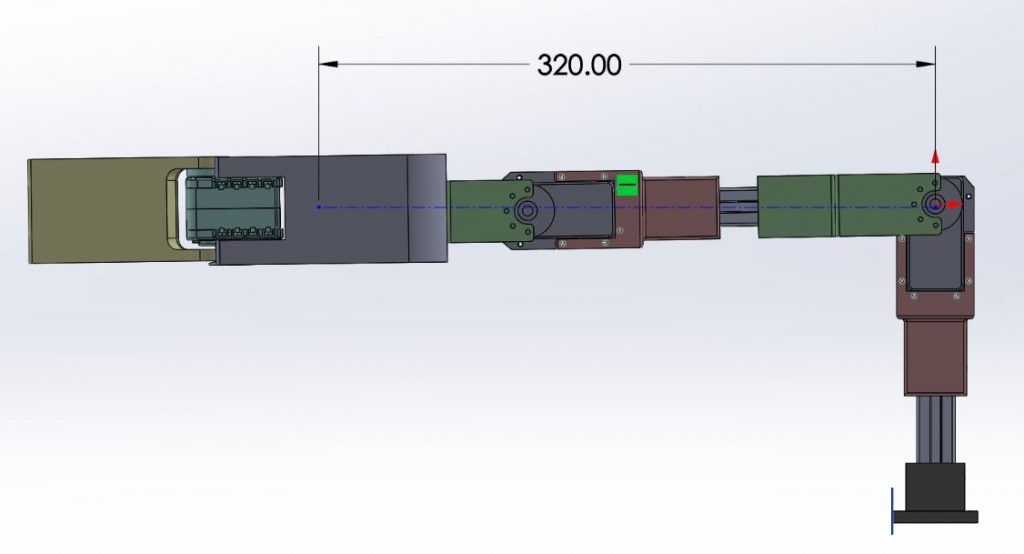
Manipulator design
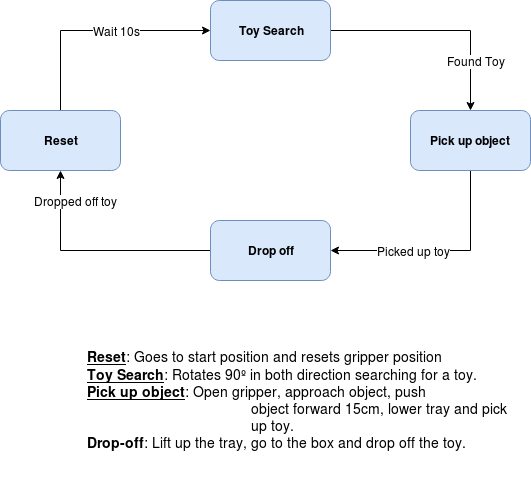
State Machine for CuBi
Final PCB Design to power CuBi
CuBi’s logo
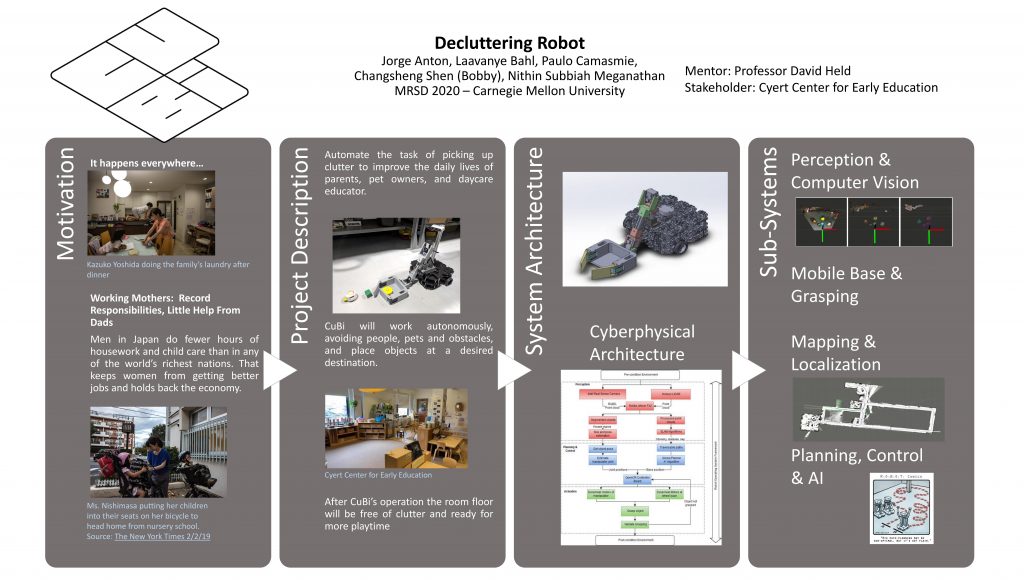
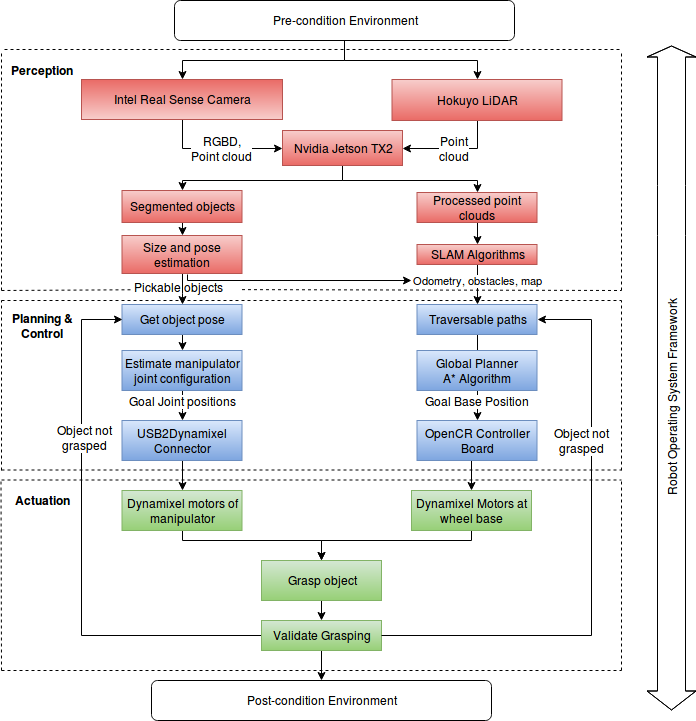
Functional Architecture
Cyber physical architecture
How CuBi sees
Our Angel Nithin
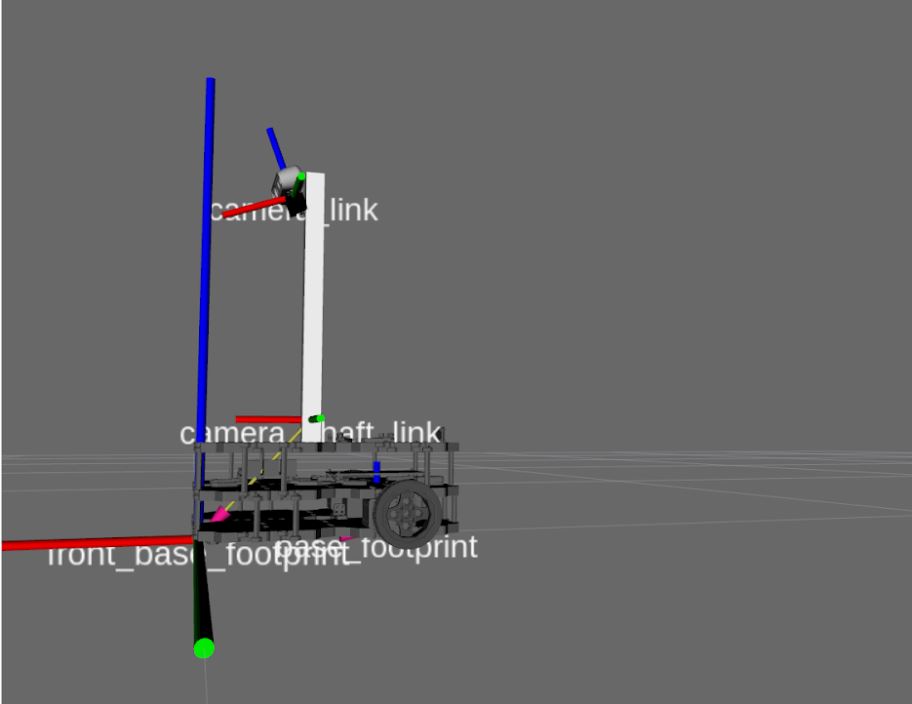
CuBi’s initial URDF
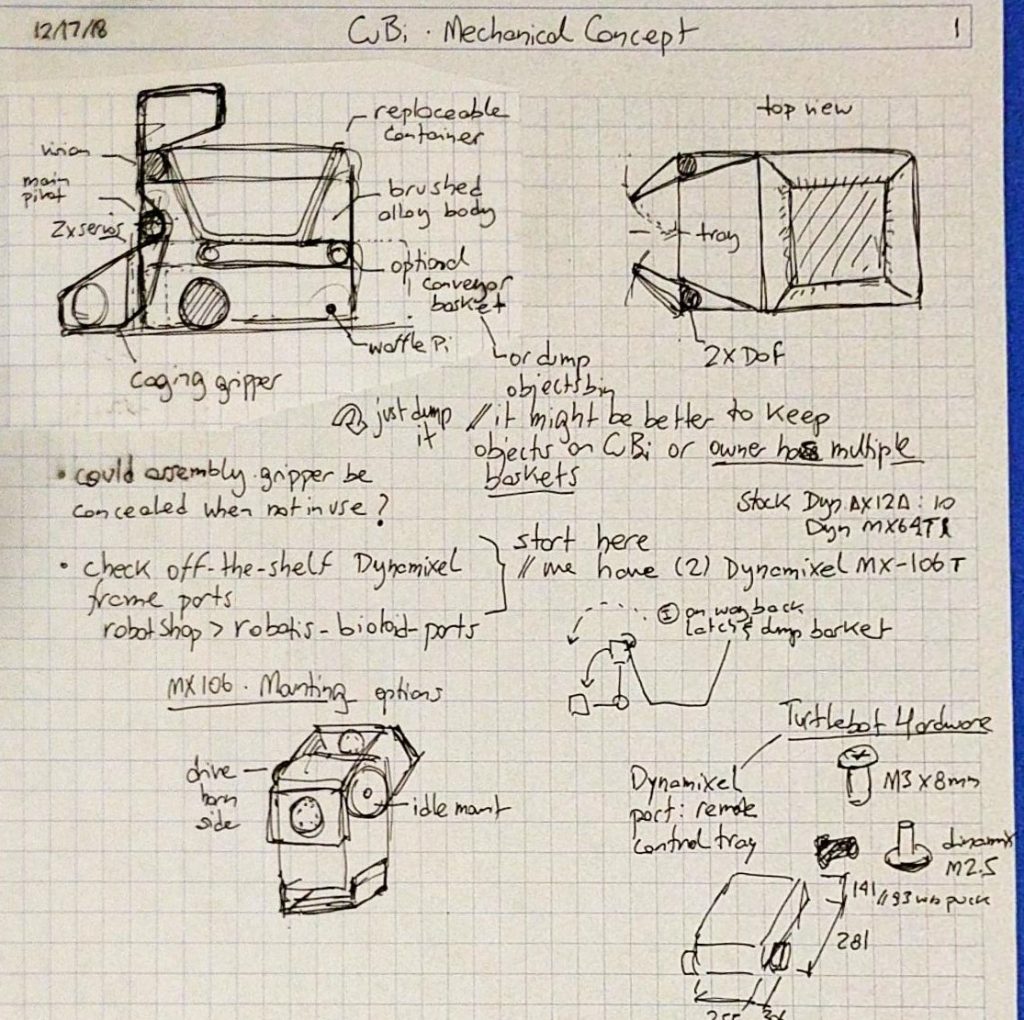
Thoughts behind the manipulator design
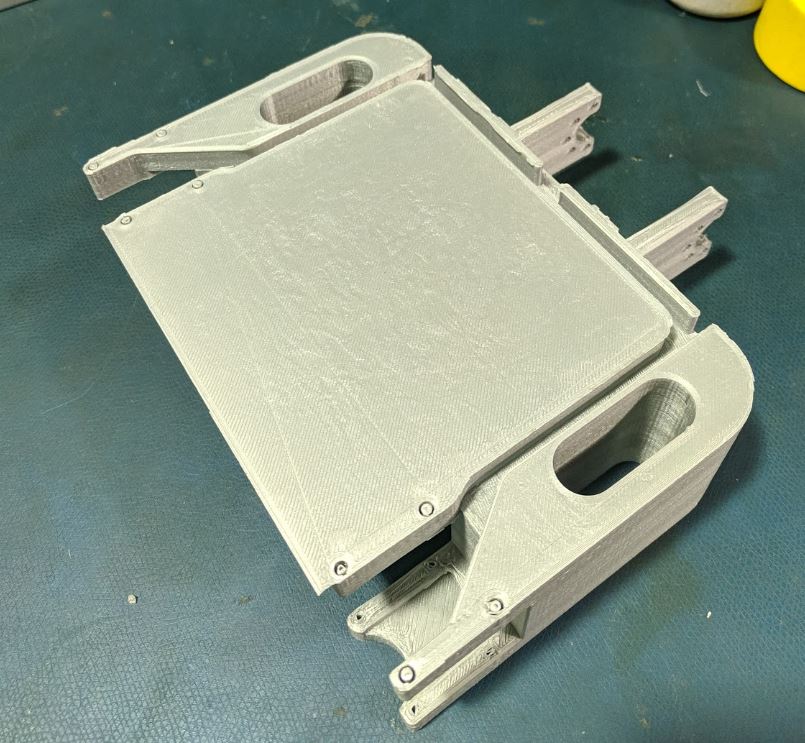
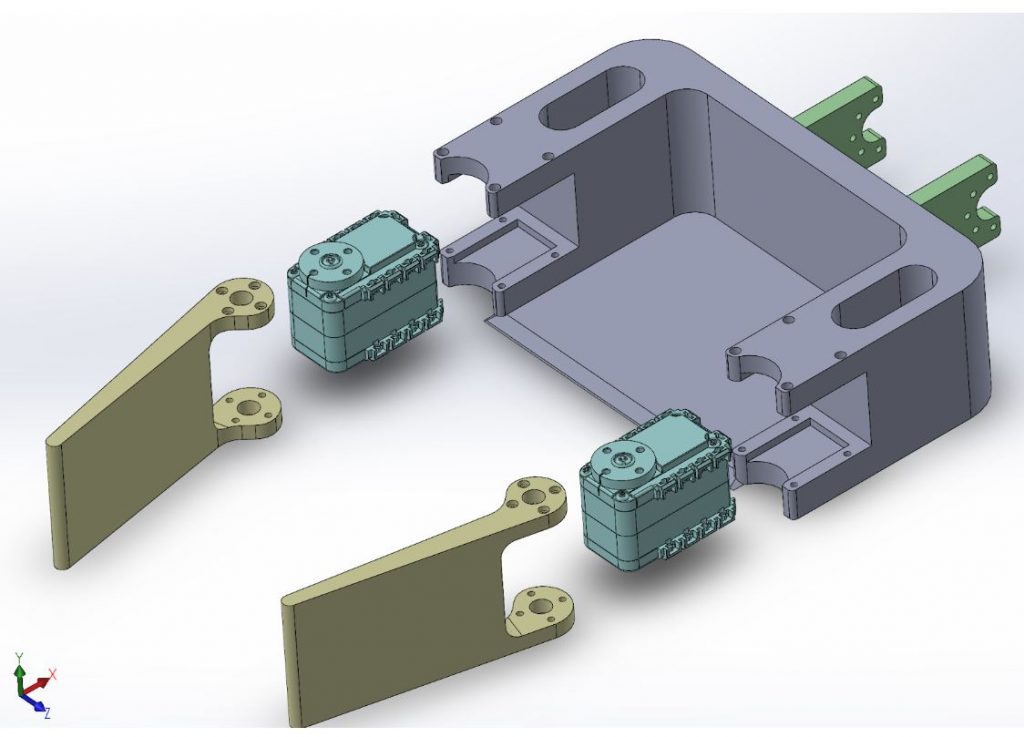
Dyanamixel motors assembly
Provision for wiring below tray
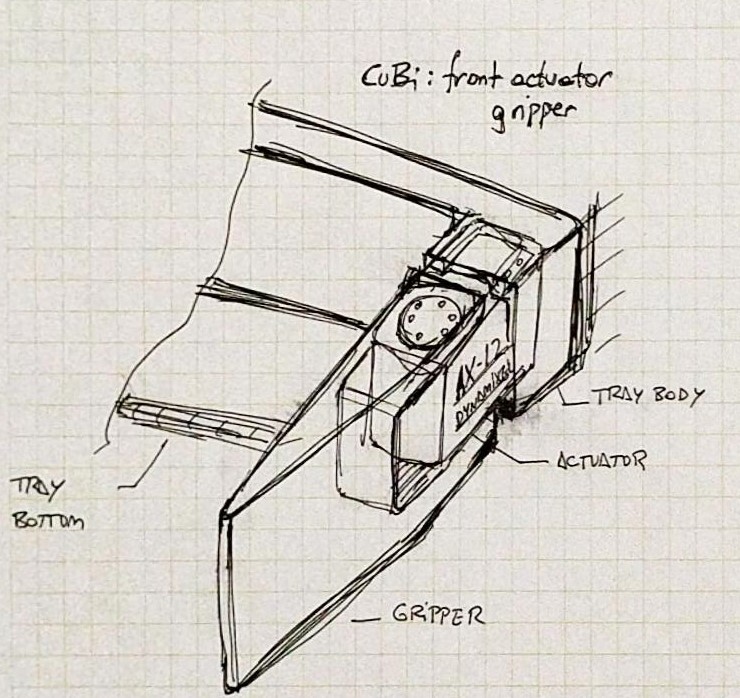
Gripper design
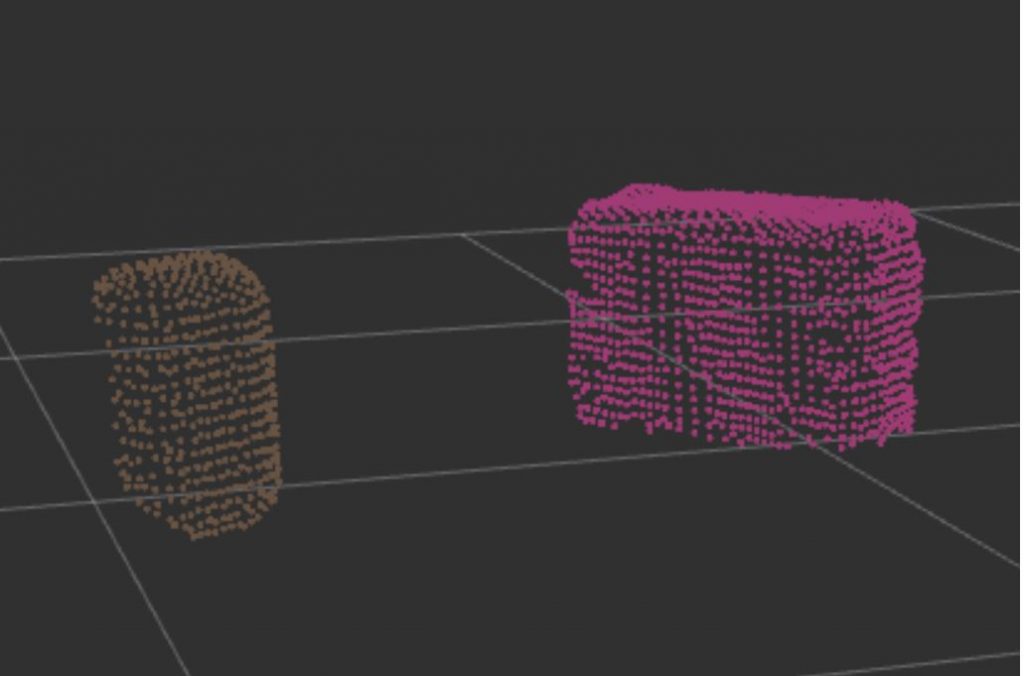
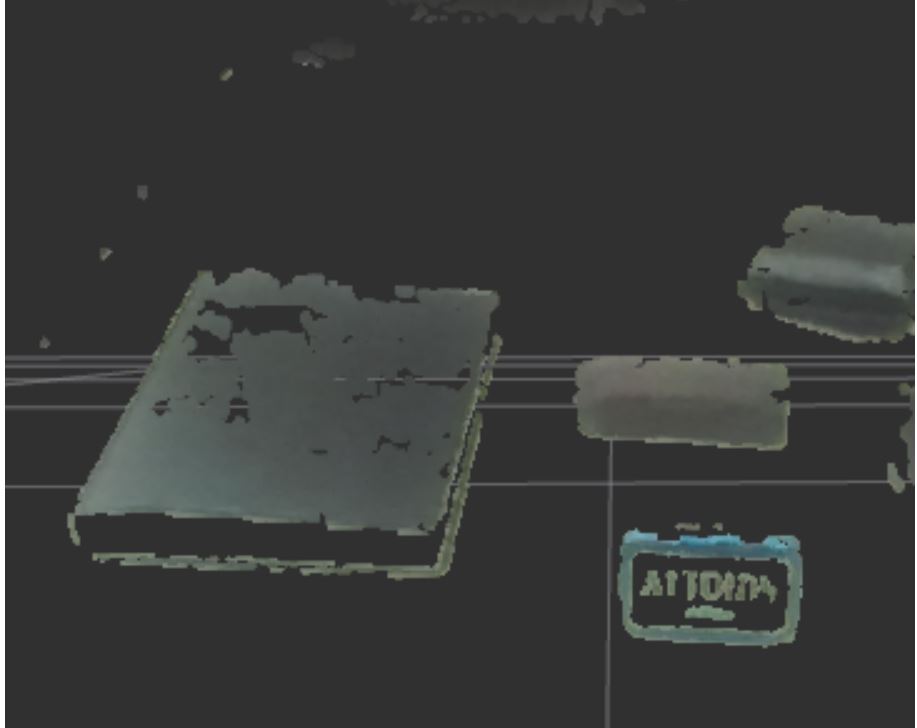
Experiments with point clouds
PCL segmentation
Team meting with mentor David Held
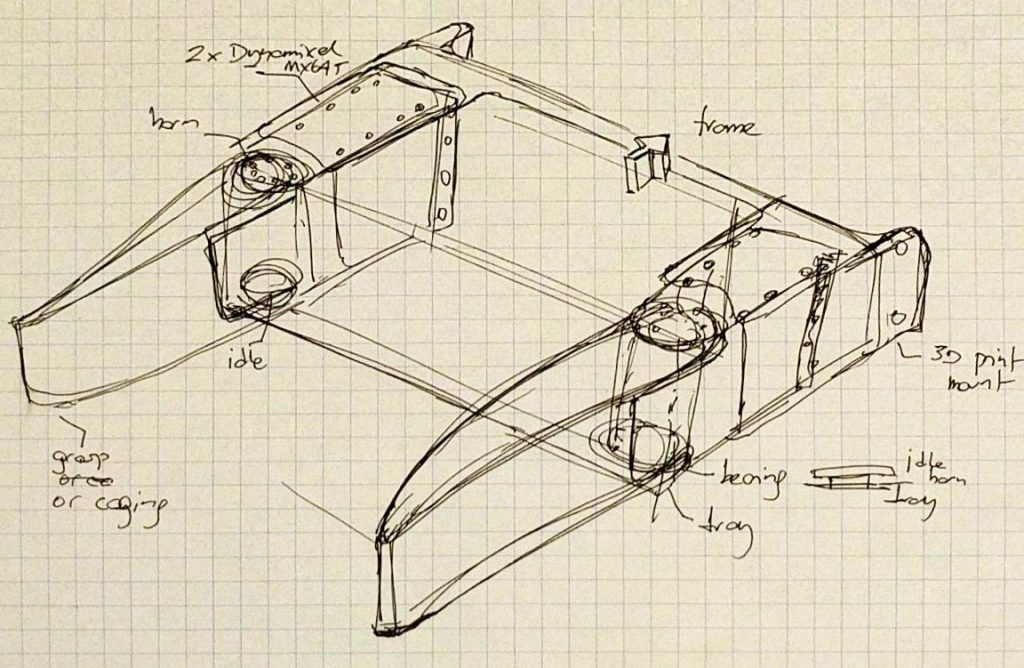
Design sketches for manipulator
Design sketches for manipulator
Gripper design
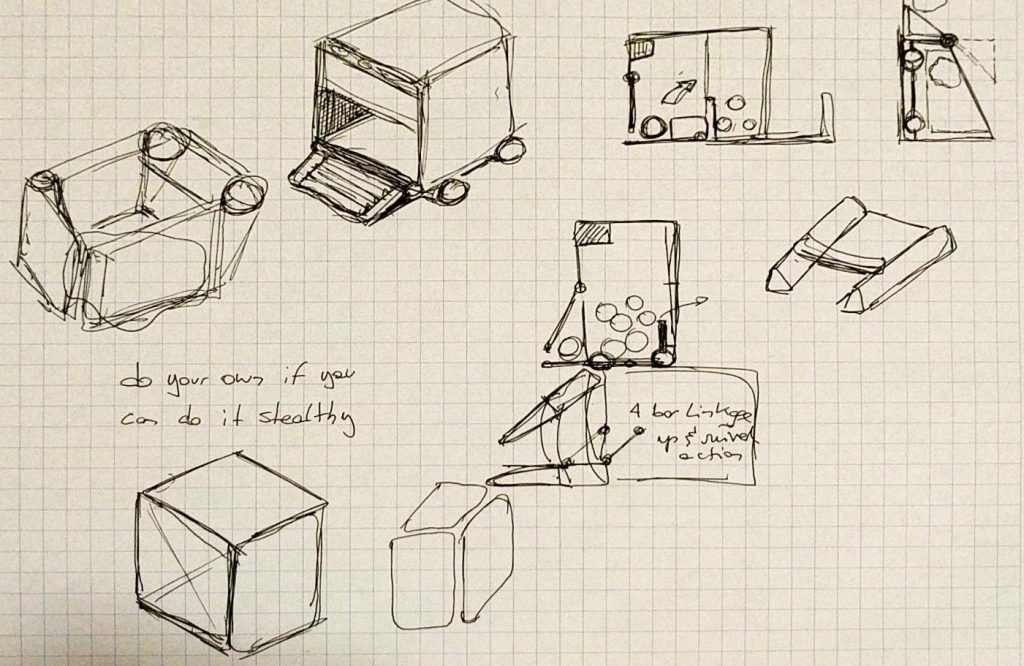
Ideas for storage
Ideation sketches
First design
First Team picture
This is what we want to solve
Example of toys