PRESENTATIONS
System Concept Definition Presentation 11/12/2019
Conceptual Design Review Presentation 12/05/2019
Preliminary Design Review Presentation 03/18/2020
Critical Design Review Presentation 05/05/2020
System Development Review Presentation 10/21/2020
Standards & Regulations Presentation 12/07/2020
Project Poster Presentation 12/14/2020
REPORTS
TeamG CoDR 12/11/2019
TeamG CDRR 05/09/2020
TeamG Final Report 12/16/2020
DESIGN BRAINSTORMING
During the start of the semester, our team had long discussions with regard to the system design. Several ideas were discussed and analysed. The results of these are maintained here.
DRAWINGS, SCHEMATICS, DATASHEETS
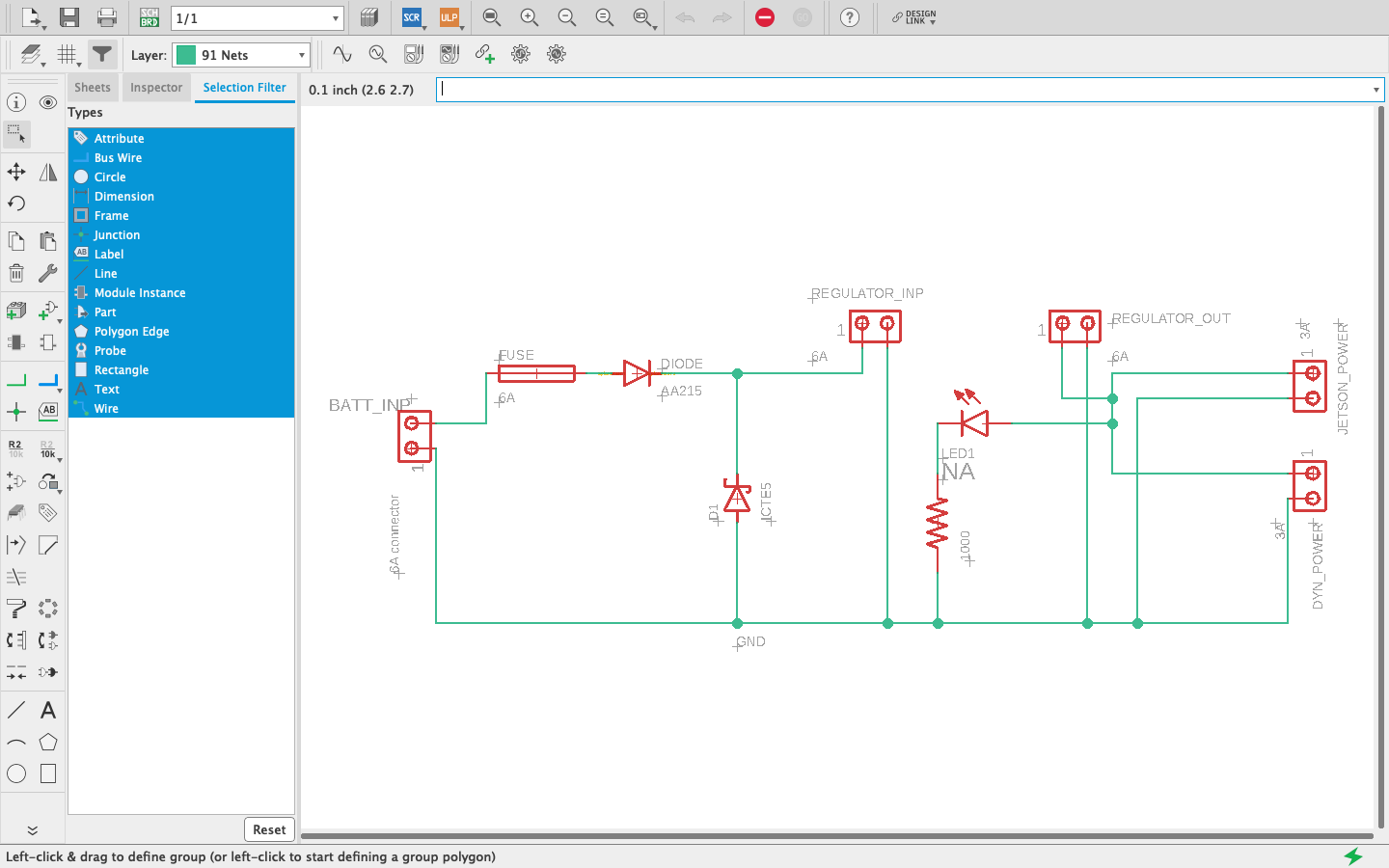
Power Distribution System PCB – Schematic, Board, Document
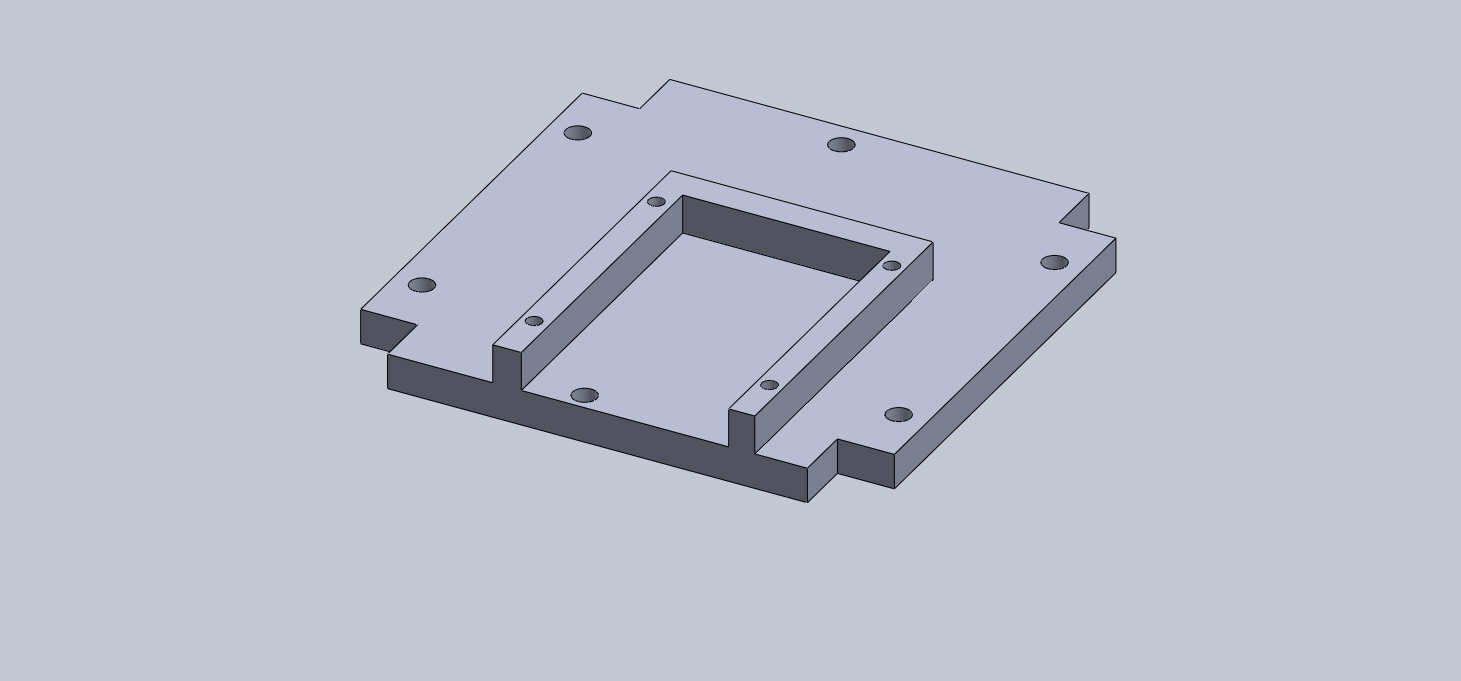
Relevant CAD Designs – Drive Link
-
- Realsense Mount
-

- Intel NUC Cradle
-
- NUC SSD Cradle
-
- SSD Top
-
- SSD Cradle
Component Testing and Experiments
As the Pit Navigator project got underway, some prior work had been done to design a brinkmanship system that used the RealSense depth camera to detect edges in the rover’s vicinity. Due to the lack of space-rated depth cameras or LIDAR systems, it was determined that this method would need to be replaced with one that derive similar depth information using only the stereo RGB images produced by the camera. These stereo images would need to be converted into a point cloud which could then be used by the brinkmanship subsystem. This feature was initially designed and tested by capturing images of the MRSD lab to fine-tune the stereo-to-depth pipeline, before being incorporated into the brinkmanship routine later in the semester.
Another experiment that was performed using the RealSense camera was a simple program to control the exposure of the images produced. This was performed because the lunar rover would need to be able to handle a wide range of lighting conditions to produce the largest quantity of useful data. In addition, this provided an opportunity for the team to develop familiarity with the RealSense hardware and API. The lessons learned from this experiment enabled effective use of the RealSense camera in later testing.
On April 3rd, the first field test of the surrogate rover was performed. Blue was taken to a location in Schenley Park which had been identified as having ledges and slopes that would be useful for gathering data. No brinkmanship code had been implemented on Blue at this point in the project. Instead, Blue was simply teleoperated to drive forward towards each ledge or slope, while the computer saved data from the motor encoders and the RealSense camera into a rosbag file. A rope was attached to Blue’s chassis to prevent it from fully falling over the brink as it approached. Tests were performed with the camera at tilt angles of 0 and 15 degrees. The stereo image data was then reconstructed into a point cloud and used to develop the brinkmanship edge detection criteria used in later tests
INDIVIDUAL LAB REPORTS
| Alex Withers | Awadhut Thube | Justin Morris |
|---|---|---|
| ILR1 | ILR1 | ILR1 |
| ILR2 | ILR2 | ILR2 |
| ILR3 | ILR3 | ILR3 |
| ILR4 | ILR4 | ILR4 |
| ILR5 | ILR5 | ILR5 |
| ILR6 | ILR6 | ILR6 |
| ILR7 | ILR7 | ILR7 |
| ILR8 | ILR8 | ILR8 |
| ILR9 | ILR9 | ILR9 |
| ILR10 | ILR10 | ILR10 |
SOFTWARE
-
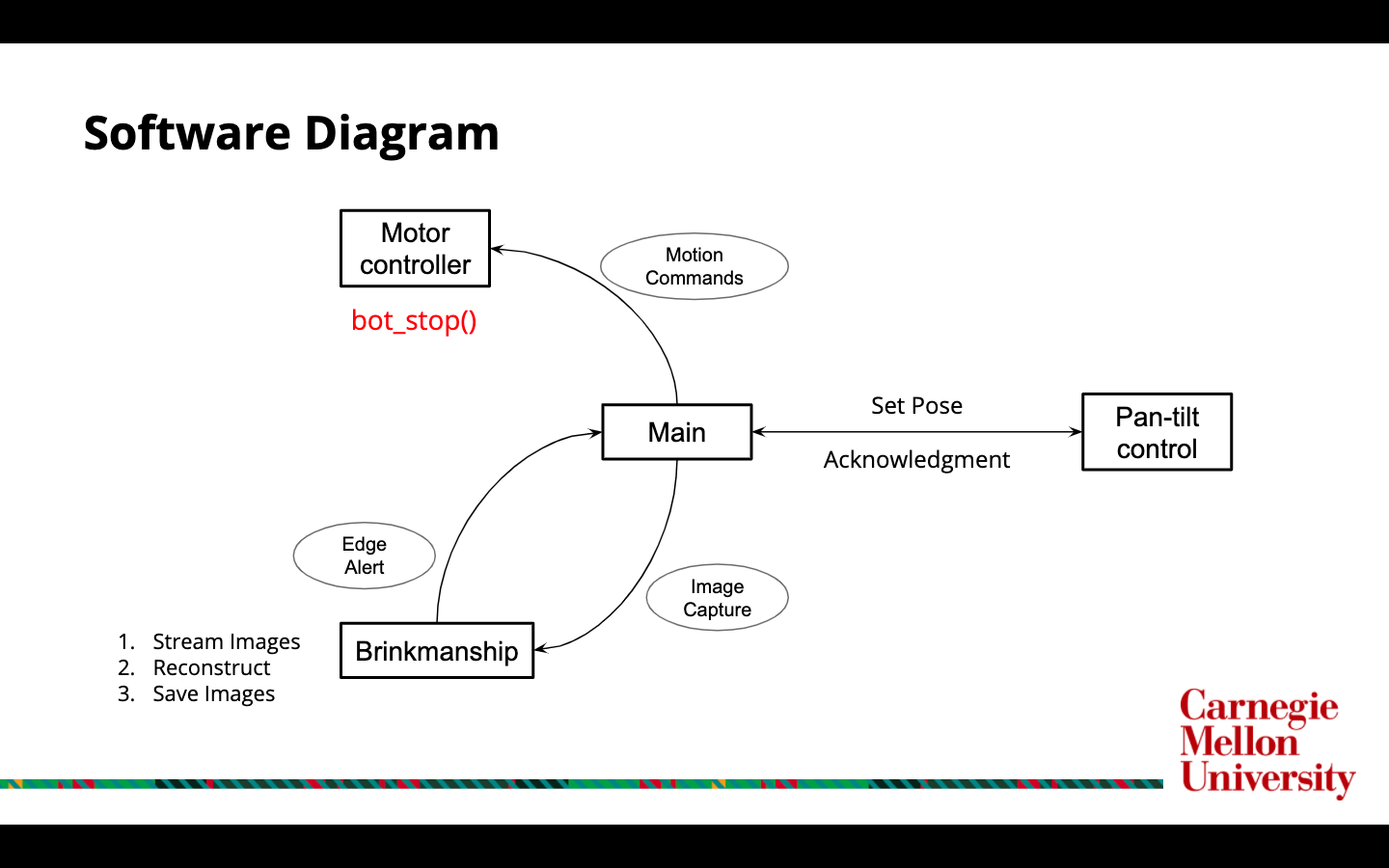
- Software Functions Interdependence
{kind=link}
{kind=link}