SVE Test Plan
Detailed Semester long Test Plan can be found on the link below.
TeamC_Test_Plan
The SVE test consisted of 2 main phases, evaluating the Bird’s Eye View functionality explicitly and testing our emergency brake.
Test 1: Bird’s Eye View
The following test plan was the procedure we went through, including familiarization, at NEA’s Nardo test facility to validate the Bird’s Eye View Functionality.
Personnel:
- David M.: PIC (Pilot in command), in charge of safety
- Shivang Baveja: Secondary Pilot
- Nick Crispie: Test Director
- Joao Fonseca:
- Hari Suresh: Test Engineer
- Nihar Tadichetty:
Prep:
- Gear and weather reminder
Materials:
- High-capacity DJI batteries (NEA)
- Six battery charger (NEA)
- FlightOps camera (NEA)
- Tripod (NEA)
- Android Tablet (NEA)
- Aircraft (FlySense)
- Laptop (FlySense)
- Antenna and Router (FlySense)
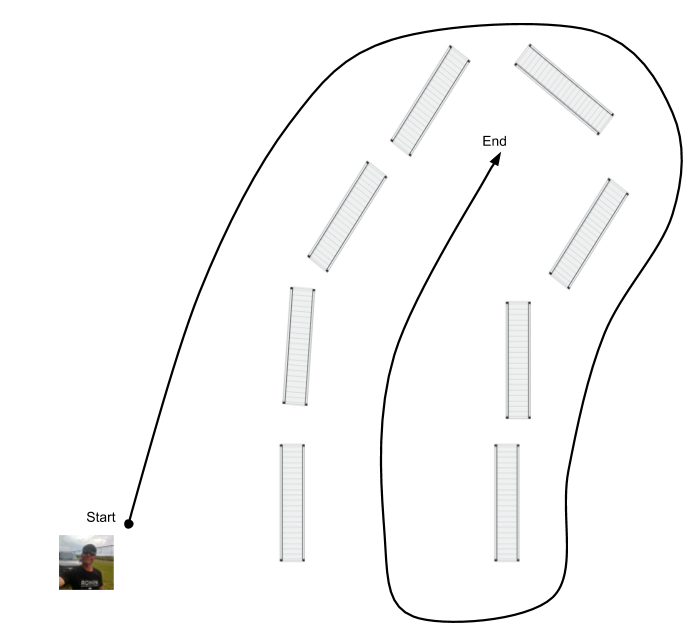
Nardo Test 1
| Item |
Description |
| Objective |
|
| Equipment |
- DJI Matrice 100 with FlySense Hardware
- Epson BT300 AR Headset / Android tablet
|
| Procedure |
- Pilot will fly quadcopter along route into the container area with line of sight of the vehicle at all times
- Pilot flies vehicle into back of enclosed area, turns around and comes back
- Pilot will run trial again with FPV view and Bird’s Eye View
|
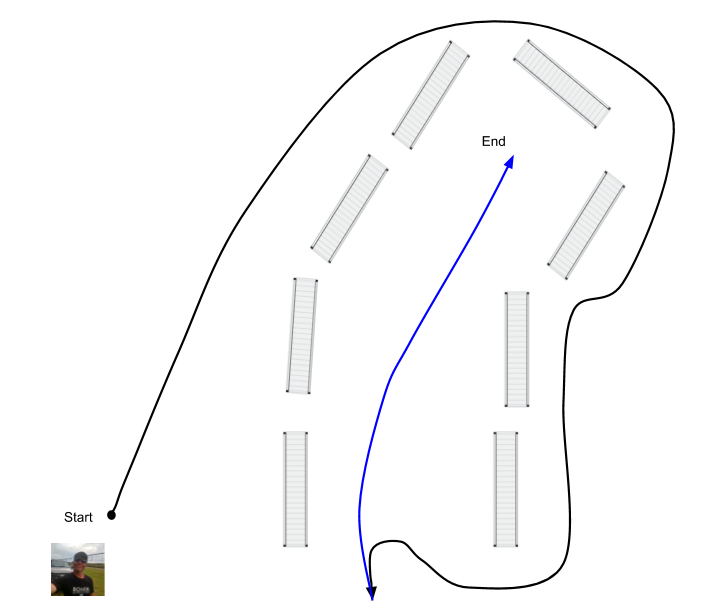
Nardo Test 2
| Item |
Description |
| Objective |
|
| Equipment |
- DJI Matrice 100 with FlySense Hardware
- Epson BT300 AR Headset / Android tablet
|
| Procedure |
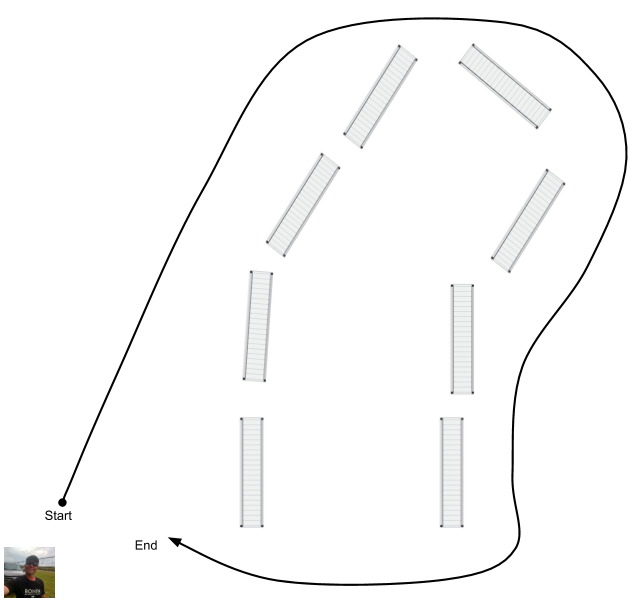
- Pilot will fly quadcopter along route around the container area
- Pilot will lose line of sight around back, flying with FPV and Bird’s eye view
- Pilot will complete multiple passes around the containers for up to 10 minutes
- Pilot will land back at start location
|
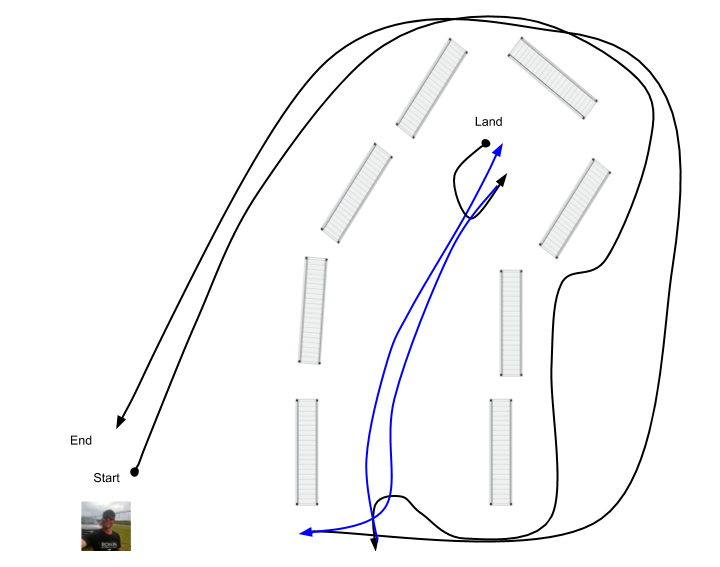
Nardo Test 3
| Item |
Description |
| Objective |
|
| Equipment |
- DJI Matrice 100 with FlySense Hardware
- Epson BT300 AR Headset / Android tablet
|
| Procedure |
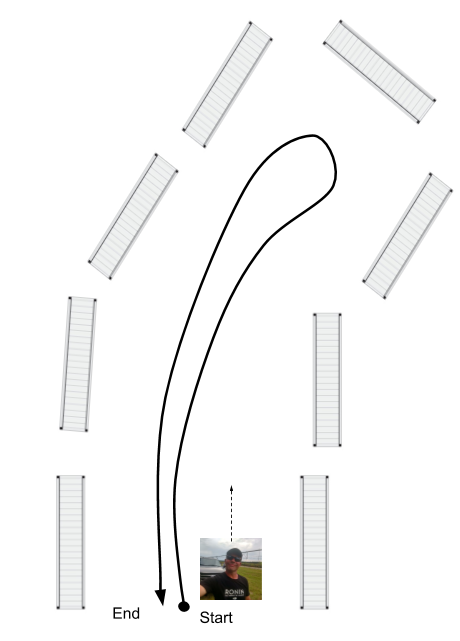
- Pilot will fly quadcopter along route, looping around containers before flying head first into enclosed area. Pilot flying exclusively with FPV and BEV
- Pilot flies vehicle into back of enclosed area and lands
|
Nardo Test 4
| Item |
Description |
| Objective |
|
| Equipment |
- DJI Matrice 100 with FlySense Hardware
- Epson BT300 AR Headset / Android tablet
|
| Procedure |
- Pilot will fly quadcopter along route around the containers forward
- At opening of container enclosure, pilot yaws the vehicle around so the front (FPV side) is facing away from the back
- Pilot navigates backward to back of enclosed area, and lands
- Pilot navigating exclusively by FPV and BEV
|
Nardo Test 5
| Item |
Description |
| Objective |
- Demo Dry Run – Modification
|
| Equipment |
- DJI Matrice 100 with FlySense Hardware
- Epson BT300 AR Headset / Android tablet
|
| Procedure |
- Pilot will fly quadcopter along route, first around the containers forward
- At opening of container enclosure, pilot yaws the vehicle around so the front (FPV side) is facing away from the back
- Pilot navigates backward to back of enclosed area, and lands
- Pilot takes off, turns 180 deg around, then flies backward out of enclosure
- Pilot navigates vehicle forwards around the enclosure back to the start
- Pilot navigating exclusively by FPV and BEV
|
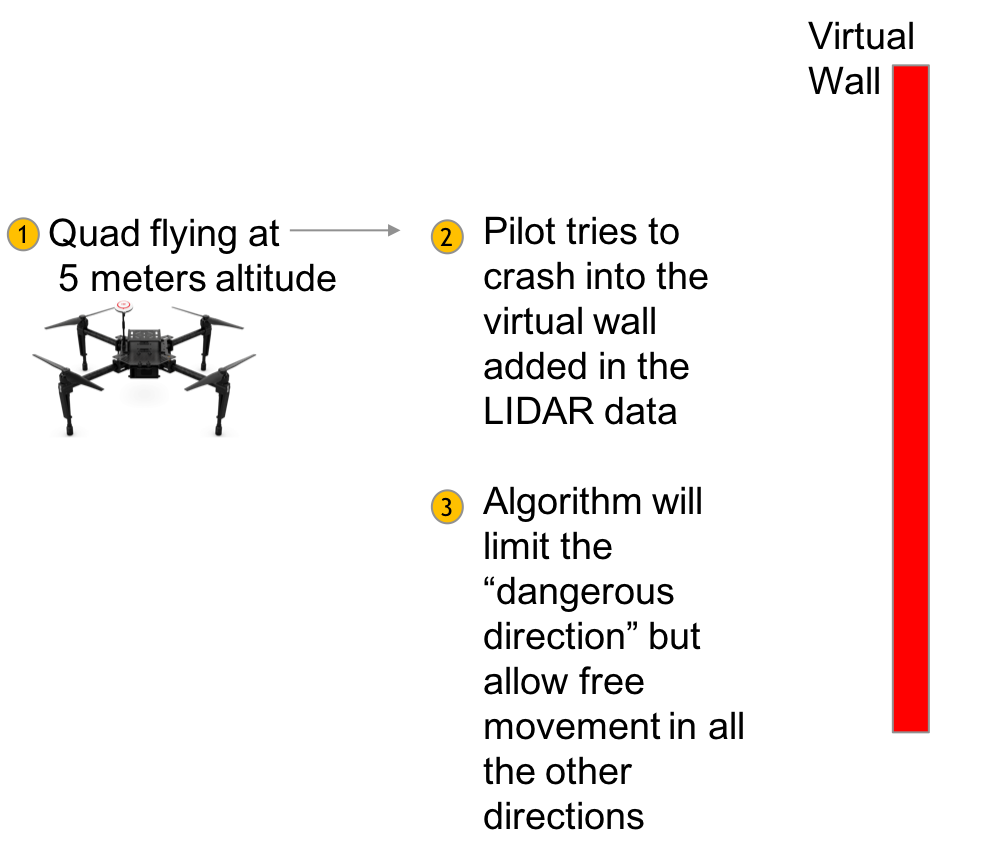
Emergency Stop Functionality
Nardo Test 6