The sensing system contains the following components:
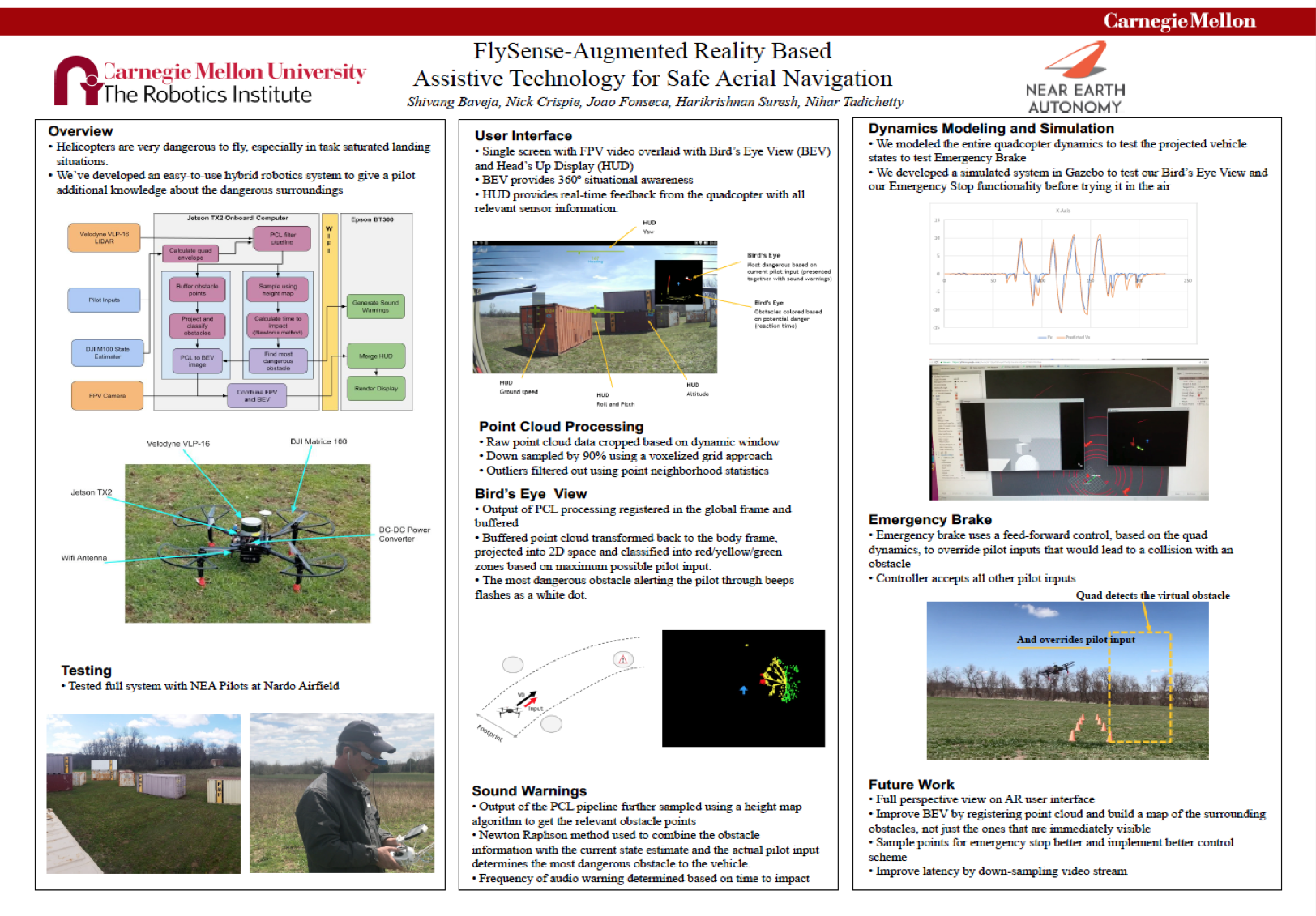
- LIDAR for 3D point cloud information (Velodyne VLP-16)
- Camera for First Person live video feed, replicating what a pilot would see in a real helicopter
- Inertial Measurement Unit for determining attitude, angular rates and specific force acting on the helicopter
- GPS sensor for localization
- Magnetometer for determining heading of helicopter
The IMU, GPS sensor, and Magnetometer are all provided integrated on the DJI Matrice 100. We mounted the Velodyne Puck on the drone to provide the point cloud for generating the obstacle map.
Along with the sensors, the pilot’s control inputs and the target destination (latitude and longitude) are provided to the onboard computer through a WiFi network. This setup is specific to our prototype, since in a helicopter based system, the data would be transferred through a high fidelity LAN cable to endure smoother data transfer.