Augmented Reality Display
The Augmented Reality Headset takes input from the on-board computer and the pilot and provides the desired functionality. It contains three major components:
- First Person View overlay
- Heads-up Display
- Bird’s Eye View

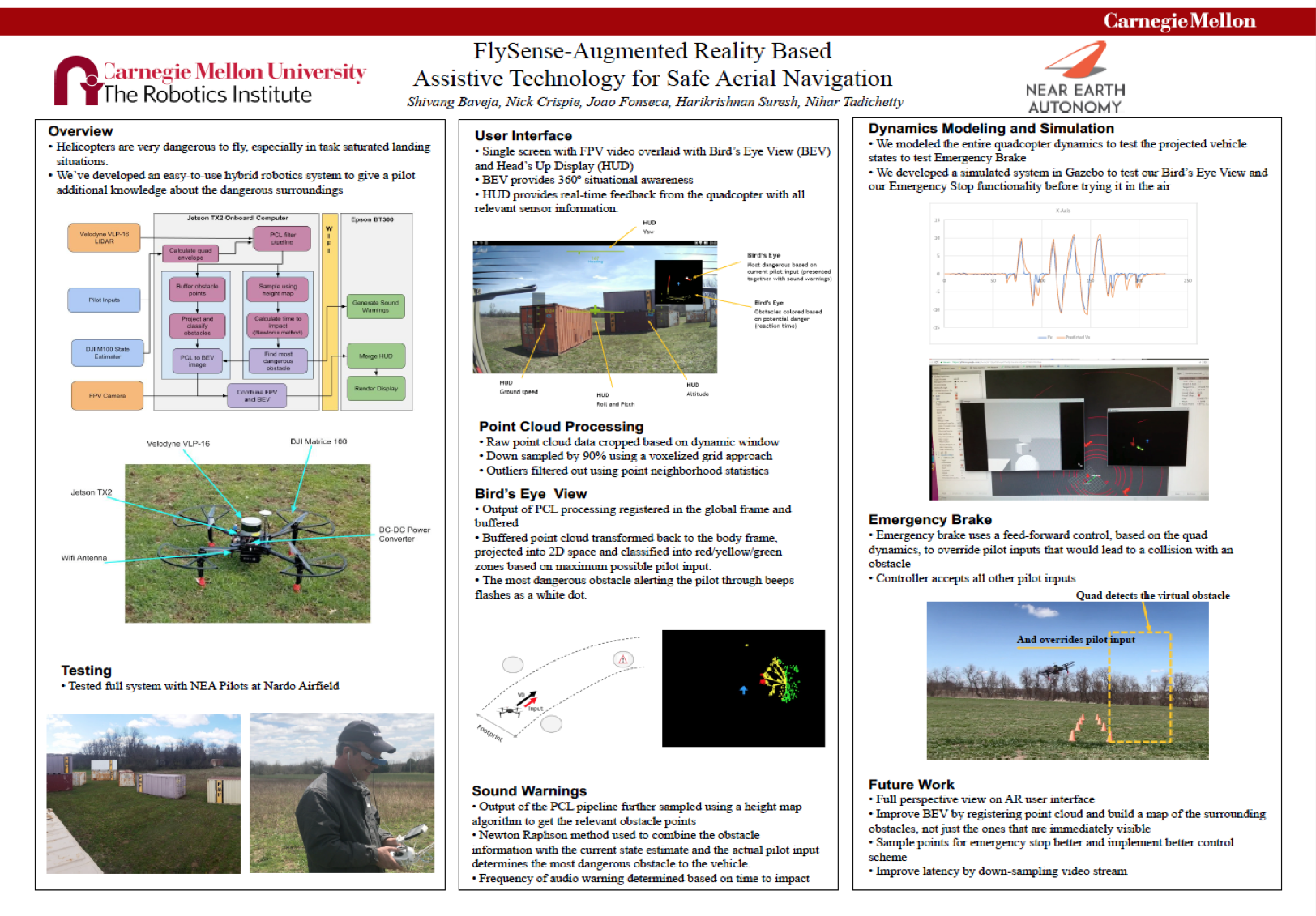
First Person View Overlay (DR.03)
The First-Person View overlay allows the pilot to have an immersive experience of how the system would feel if he is actually flying a helicopter. This is because we based the system on the quadcopter which means that the pilot has to fly it from the outside.
The FPV overlay provides the pilot the front view as if he is sitting inside a helicopter cockpit, this simulation is augmented with the HUD display of relevant sensor information and bird’s eye view showing obstacles around the flight system.
Heads-up Display/Standard Instruments (MR.10)
This feature is needed to ensure the solution is “acceptable” to the pilots and needs to be in line with the standard practices of HUD displays currently in the market. Standard instruments should allow pilots to cruise without the need to look at any of the current physical instruments.
The system will receive from the helicopter computer the cleaned state estimation data for:
- Navigation: Heading vector, current altitude, and change in altitude
- Dynamics: Ground Vector Speed and change in ground speed
Bird’s Eye View (MR.09)
The “Bird’s Eye View” receives LIDAR data (or alternative source) from the helicopter computer and displays it to the pilot in a 2D format resembling the systems currently used for car parking.
Unlike the case of a car parking aid, a helicopter travels in a 3D environment and the range of speeds where this command can be useful is substantial as it can be useful cruising and not only parking a helicopter. To cater to this, the position of the helicopter symbol and the scale of the map will be managed dynamically.
Position of the symbol inside the widget: the helicopter symbol is placed right in the center of the bird’s eye view image so that the pilot can have a clear symmetric estimate of how far things in the current flight path.
Managing the dynamic window for what will be displayed:
In the plain of the movement the selected area will be defined by a constant (x seconds of travel) times the current speed.
In the orthogonal direction, it will be proportional to the distance that can be travelled with the maximum pilot input.
In both planes there will be a minimum distance threshold so that data is still displayed when the helicopter is parked.
Coloring code: obstacles fairly close (e.g. 5 seconds before contact) will be presented in red with colors than evolving proportionally into yellow and green
Note: In addition to the graphical information, sound aids in addition to focus points (blinking white dots in BV) are deployed to better assist pilots in identifying the nearest object.