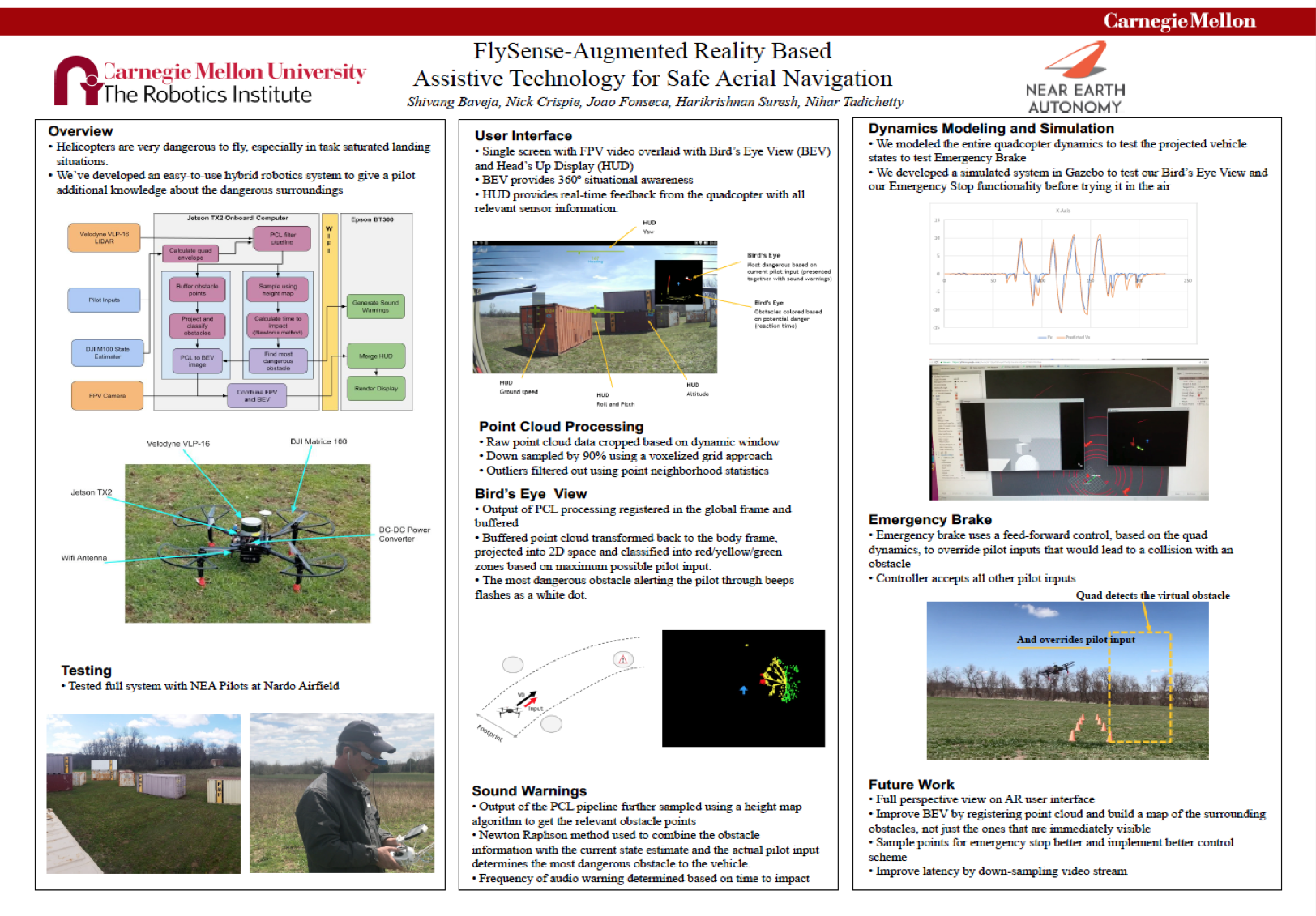
The aerial subsystem consists of hardware and software components as shown below
- Hardware
- Sensor suite
- Onboard Computer
- Onboard Power Module
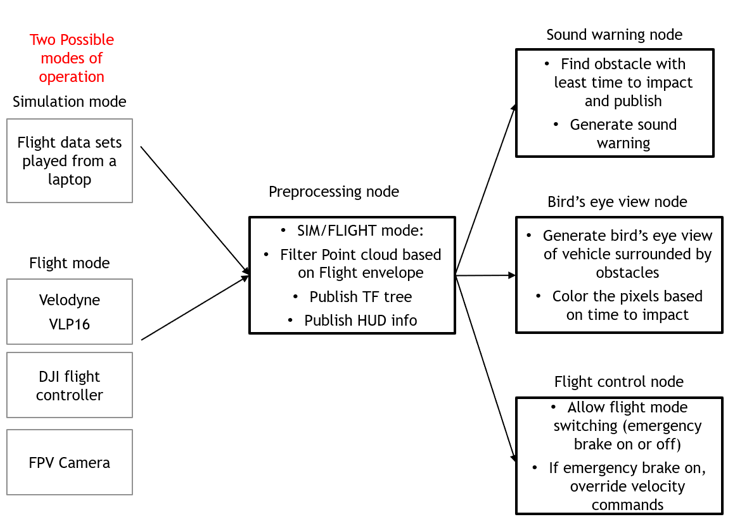
- Software
- Dynamics Model
- LIDAR Perception
- Backend Algorithms for Bird’s Eye View Coloring, Sound Warnings and Emergency Braking
The full aerial subsystem with the payload is shown below:

The software architecture is shown in the below flow diagram