Toggle navigation
Home
System
Summary
Design
Requirements
Architecture
Implementation
Performance
Project Management
Schedule
Test Plan
Parts List
Issue Log
Risk Management
Media
Videos
Picture Gallery
Documents
Reports and Presentations
PCB Schematics
Software
Meet our team
Risk Management
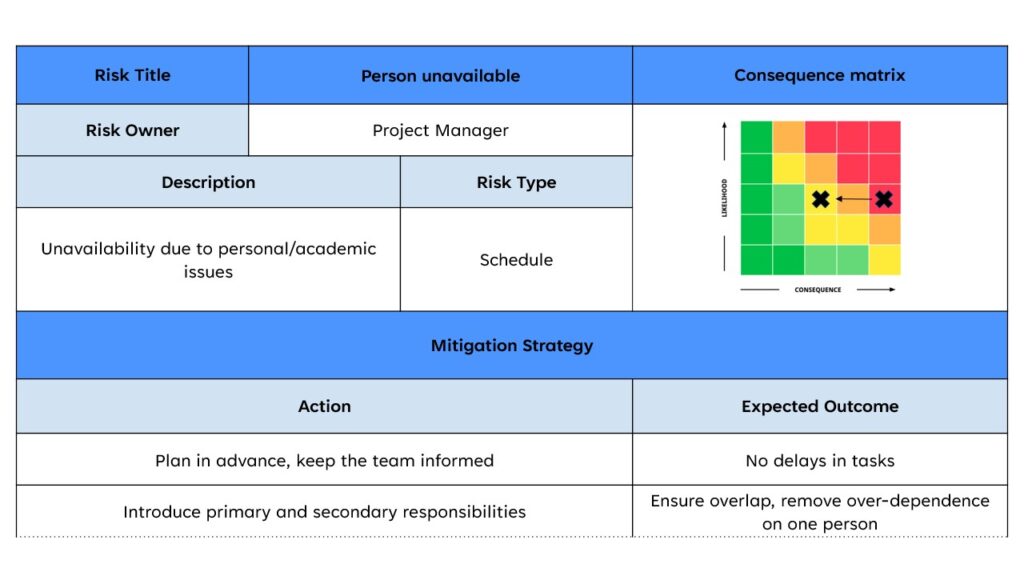
Risk 1: Person is Unavailable
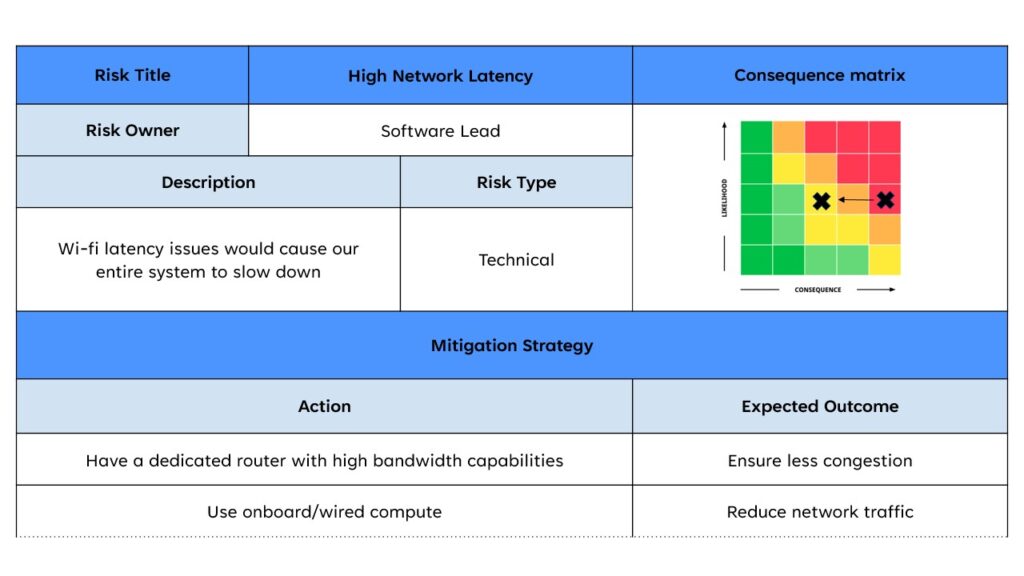
Risk 2: High Network Latency
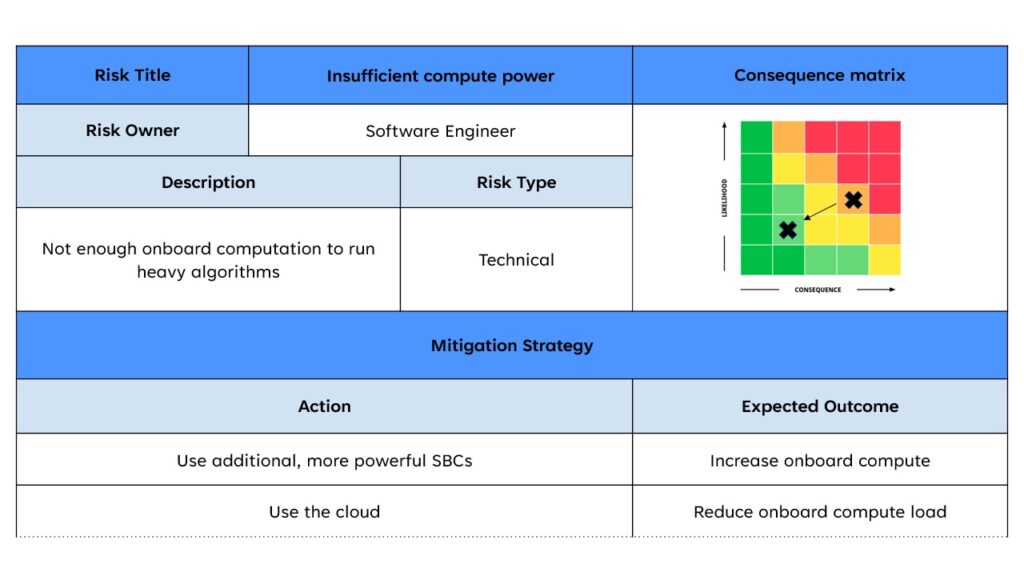
Risk 3: Insufficient Compute on Fetch robot
Risk 4: Inaccurate results from Visual Inspection
Risk 5: Sub-optimal grasps generated by Grasping pipeline
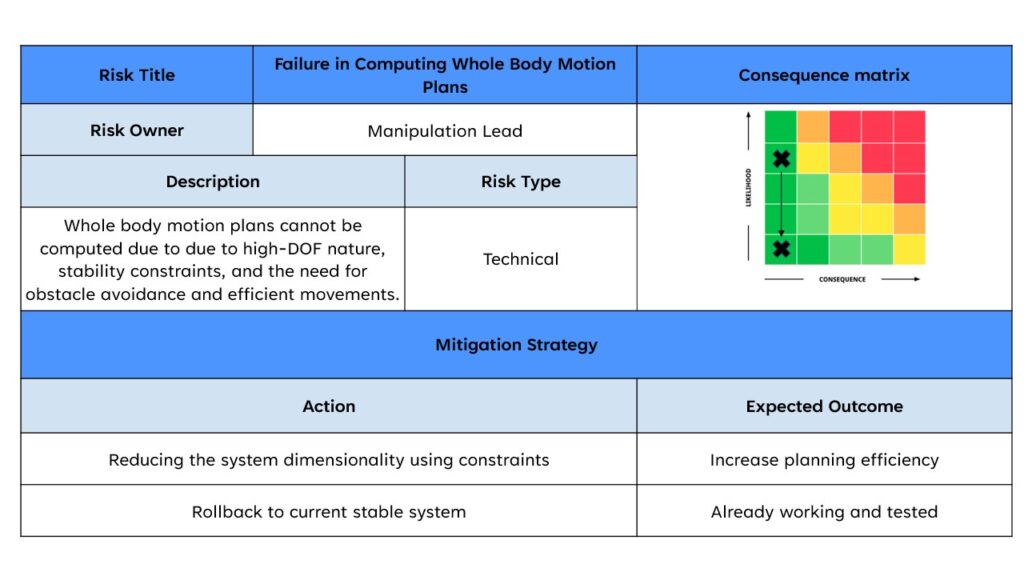
Risk 6: Failure/Sub-optimal Whole Body Motion Planning pipeline
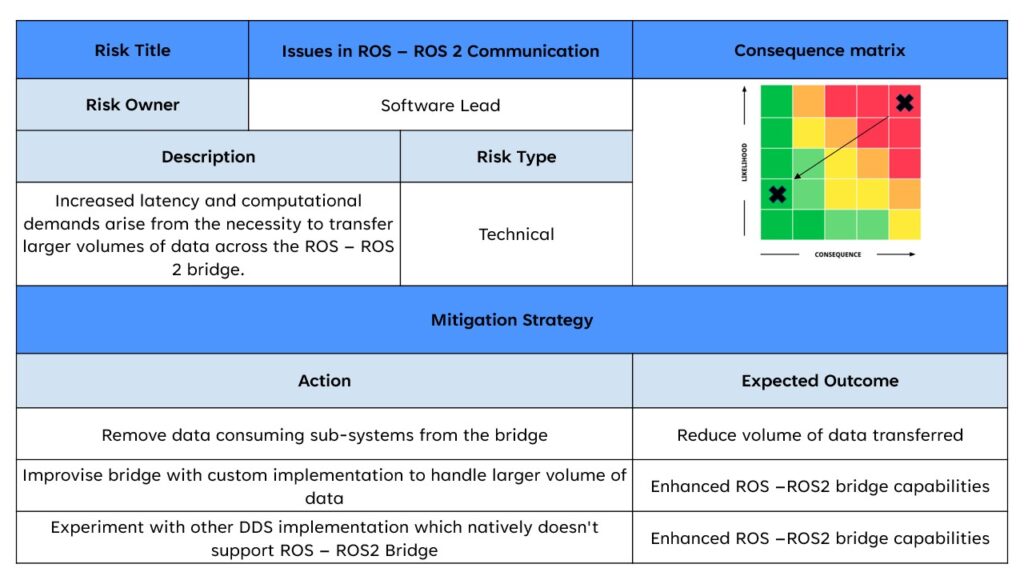
Risk 7: Communication Issues between ROS – ROS2
© 2016 All Rights Reserved
|
Powered by
WordPress
|
Made with ❤ by
Themely