Welcome to the project website for COLA Robotics!
System Summary
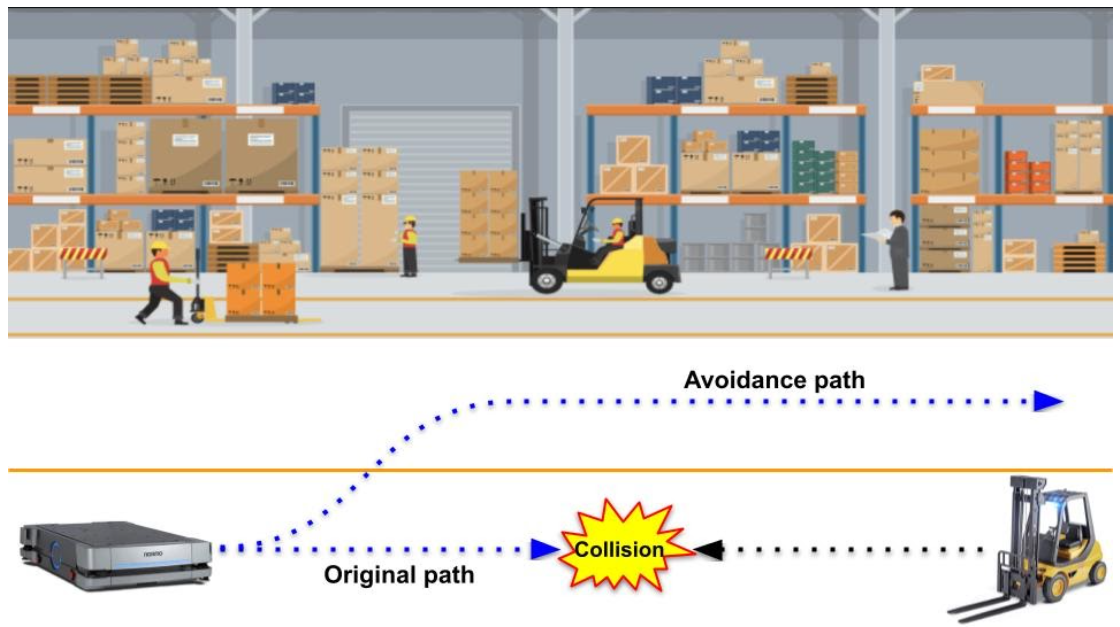
Efficient collision avoidance is essential for mobile robots to operate effectively, especially those deployed in industrial environments which include a variety of different obstacles such as pedestrians and forklifts. Inefficient collision avoidance could cause drops in robots’ productivity, due to unnecessary stoppings and deviations from path; in the worst case, it could cause collisions and lead to severe property damages. With the rising number of mobile robots being employed, which has doubled in the last 3 years with over 80,000 mobile warehouse robots employed by Amazon alone, the need for efficient collision avoidance is becoming ever more crucial.
This project explores the use of obstacle classification and trajectory prediction to improve the collision avoidance capabilities of mobile robots in such industrial environments. By recognizing the type of each obstacle, the robots can plan more efficient avoidance paths based on the obstacles’ specific characteristics and predicted movements, thus allowing them to spend less time avoiding obstacles and more time doing useful work.
Most often, mobile robots in these environments are equipped with 2D LIDAR sensors, but the data from these sensors are too sparse to provide obstacle classification information. This project will add an onboard camera in addition to a 2D LIDAR on a physical robot in order to validate obstacle detection and classification capabilities on scale-models of common obstacle types. Prediction and avoidance capabilities will be validated in simulation in a typical warehouse environment with multiple obstacles.
Our Sponsor
