Problem Description
Wellheads are infrastructures for pumping oil and gas on the ocean floor. They are responsible for a large portion of the world’s oil consumption. When one of these system breaks down it can assume billions of dollars in damages. A prime example is the BP oil spill which had catastrophic effects on the BP Company and the Gulf of Mexico as a whole.
Unfortunately, current maintenance and monitoring of these wellheads is expensive costing hundreds of thousands dollars per intervention. At pressures too deep for human to useful intervene, oil companies are often require a specialized ship, with a highly trained crew to deploy a manual ROV (remotely operated underwater vehicle) to perform a simple checkup or turn a valve. Due to this cost, oil companies often choose to leave well-head unmonitored until a problem arises, and by then it can already be too late.
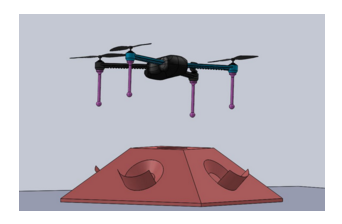
Seeing this pain, our team proposes an Autonomous Robotic Solution to reduce cost, resources, and human intervention. We will demonstrate a terrestrial analog to an underwater vehicle capable of autonomously searching for, identifying and docking with undersea wellheads. Due test resources and pool time constraint, a terrestrial analog was chosen over an actual AUV (Autonomous Underwater Vehicle). This terrestrial analogue will be a quadrotor Drone capable of ‘swimming’ through air.
Because an AUV must interact with the wellhead, the ability to dock becomes an extremely important functionality. An underwater environment is not conducive to high visualization. Being able to transmit information to the AUV through the dock would provide large amounts of data quickly. Stabilization during inspection will provide higher quality photographs to be taken.
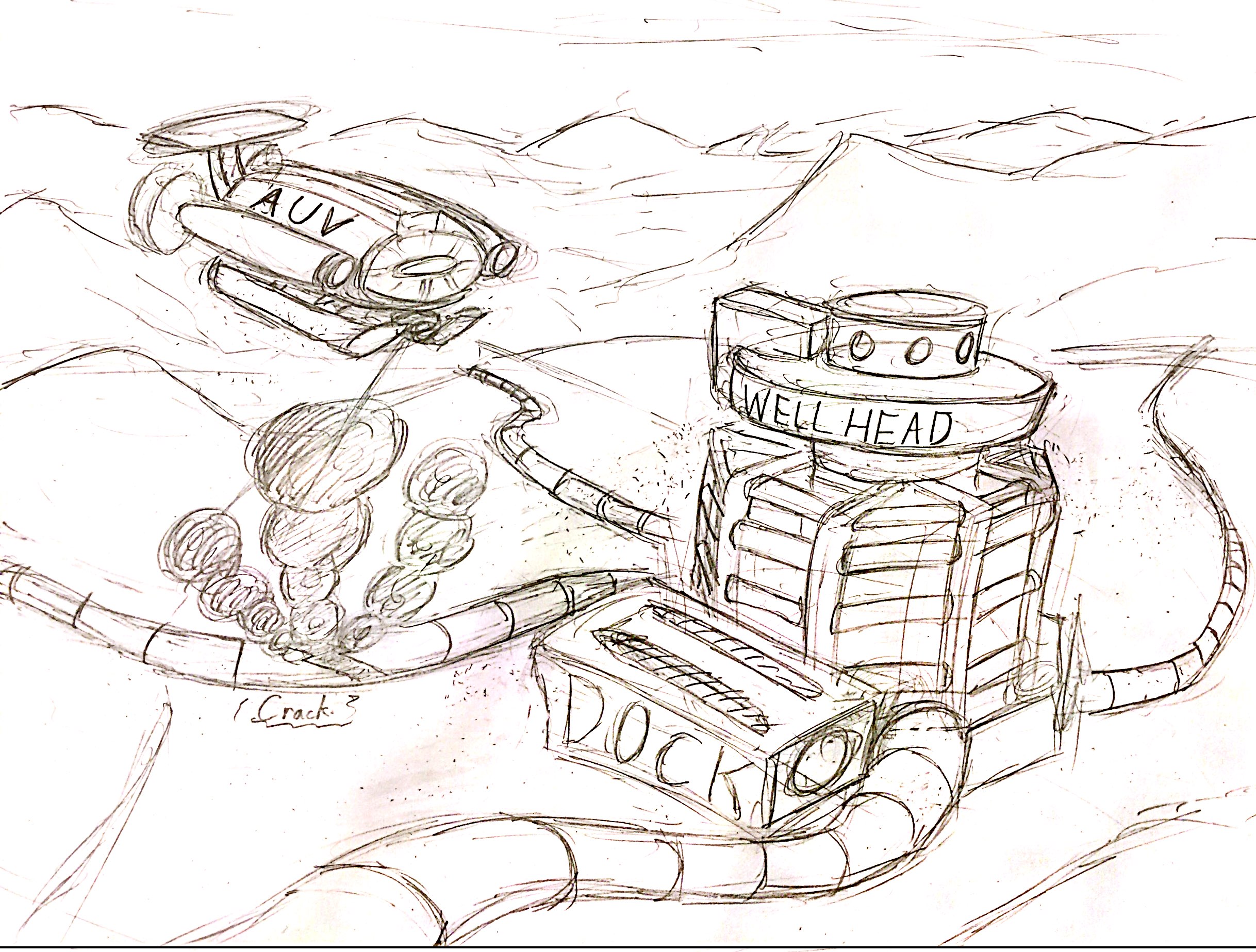
AUVs (Autonomous Underwater Vehicle) exist that can search and identify undersea wellheads, but none we have seen that can autonomously dock or intervene at a wellhead. AUV with this capability will allow for cost effective, regular maintenance and monitoring of this wellhead which will reduce avoidable damages and loss of resources. Figure 1 shows a pictorial description of the problem statement.
We propose to demonstrate a terrestrial analogue to an underwater vehicle capable of autonomously searching for, identifying, and docking with underseas wellhead.

Use Case
The depths of the ocean floor are home to an enormous plethora of flora and fauna. In our times, however, manmade obstacles have joined the ranks of deep sea denizens. There may be no more important man made sea inhabitant than the deep sea wellhead. These objects facilitate the distribution of our widest used fuel source, fossil fuels.
A wellhead just like any other lies at the bottom of the sea near the gulf coast. The life of the undersea wellhead is one of isolation and duty. Years ago he was lovingly designed and built by a team of engineers. Those engineers however lost touch with the wellhead as soon they placed him underneath the ocean surface. It has been years since the wellhead has seen another metal denizen or human face. The wellhead still must do his job valiantly day in and day out, because the fossil fuels he carries and protects would create a catastrophe if they ever seeped into the ocean waters.
To most everyone else, today was like any other day, but for the wellhead, today was a day of tragedy. This structure has grown weak with time. The rust around his pipes is growing slowly, getting worse every day. He sees oil leaking from the cracks in his body, more each day. The wellhead is also able to provide valuable information through the dock and power to help his friend get home safely and with the payload.
The wellhead is afraid. He knows that the ROVs necessary to go underwater and interact with him are prohibitively expensive. He knows that they’ll never check on him until it is too late.
The wellhead waits and waits and waits. He does not know this, but help is on the way. Suddenly one morning, an autonomous underwater vehicle comes into his vicinity. There was no tether connecting him to an expensive ROV ship. There was no skilled laborer operating him from afar. The vehicle notices the wellhead, surveys every inch, and notices the leak. The next day, a large team comes and saves the lonely wellhead.
The wellhead cannot believe that he and the other water denizens were saved that day. He believes that this is a miracle. What he does not realize is that the oil company that bought his new autonomous friend, bought him with the specific purpose of doing routine checks on the wellheads. Now the company can do routine checks in order to protect the environment and their legal interests. Every month the lonely wellhead receives a visit from his friend the autonomous underwater vehicle.
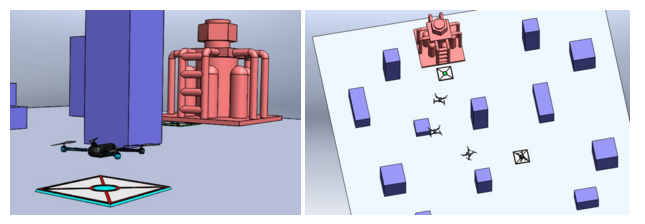
Our terrestrial analog, the drone, will start somewhere in the vicinity of the wellhead, and lift off to begin its search. It will perform a searching strategy until it comes across the wellhead as shown in Figure 2.
It will perform a searching strategy until it comes across the wellhead. Once the drone thinks it has found the wellhead it will identify via a specialized tag or feature. The drone will then initiate its pre docking orientation and positioning as shown in Figure 3.
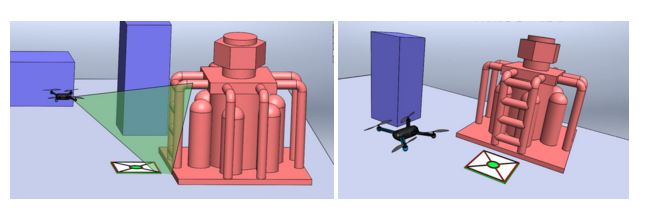
It will perform a searching strategy until it comes across the wellhead, Once drone thinks it has found the wellhead it will identify via a specialized tag or feature. the drone will then initiate its pre-docking orientation and positioning,
The drone will then proceed to dock accordingly, and the system will be successfully complete.