Use Case:
Andy is driving to work along his normal route, down Forbes avenue through Oakland. He is attending to the road but he is in autopilot, it is early in the morning and he has made this commute hundreds of times. He turns onto Bellefield then makes a left on Fifth Avenue. His car is alone in the left lane clear to the intersection at Bouquet, where the light is red. He begins to slow down 100 yards away when the light turns green.
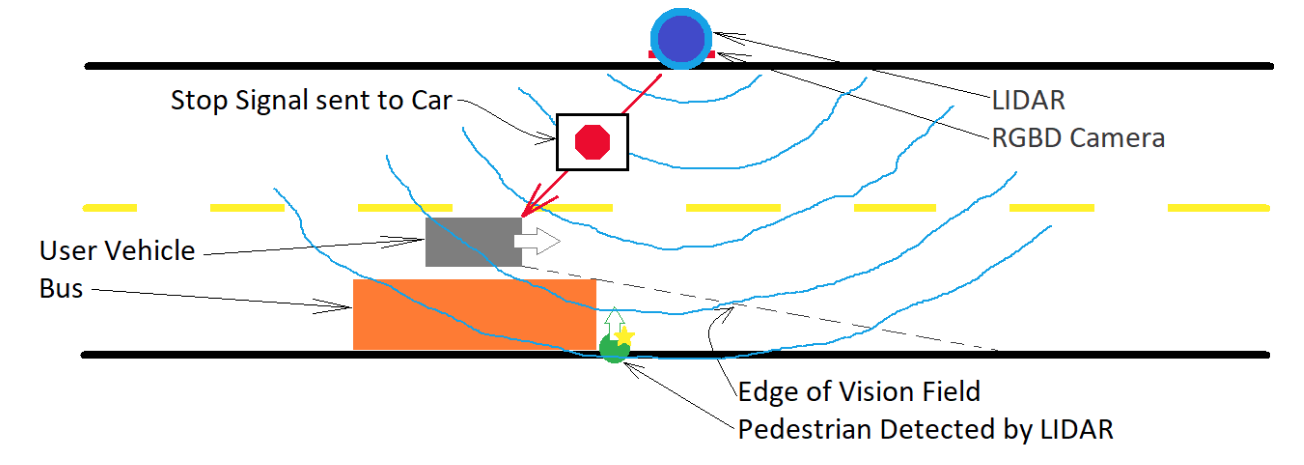
Andy accelerates to pass the bus (shown below in orange) when a man steps out in front of the bus, 15 feet in front of his car. The car comes to an immediate halt as the pedestrian freezes in the intersection. Andy’s car is 2 feet from the man, but his foot didn’t reach the brake until the car was 5 feet away. As he breathes a sigh of relief, Andy wonders why his car stopped…
5 seconds earlier, when Andy was approaching the intersection, his car’s computer had made a wireless connection with a LIDAR system monitoring the Fifth Avenue-Bouquet intersection. The system continuously detects vehicles, pedestrians, and other moving objects in the vicinity of the intersection. This system is the blue puck with red bar displayed at the top of the schematic.
2 seconds earlier, a man had jumped out of the bus and made a quick turn in front, hoping to cross the street before the light turned. The LIDAR system had tracked the man’s movements and predicted that his path would move in front of Andy’s car. The system instantaneously sent a signal to his car’s computer, alerting its obstacle avoidance system to the pedestrian about to be in front of the car.
4 tenths of a second earlier, Andy’s car had automatically braked, 1 tenth of a second before Andy had a view of the man and 3 tenths of a second before he could have applied the brakes. Thanks to the LIDAR system that monitors the intersection, Andy’s car avoided an accident that neither he nor his car would have been able to prevent on their own. The entire situation is depicted in a simplified form below.