Environmental Scientist at Yellowstone national park, Tom, wants to study Yellowstone’s thermal activities. As part of his study, he needs to track the temperature across a region. It is not feasible for him to go out and collect data for modeling every day, and he cannot directly use satellite-based thermal infrared remote sensing data as the resolution is way below expectation. So he decides to use SAMP system, and start to work on SAMP master computer.
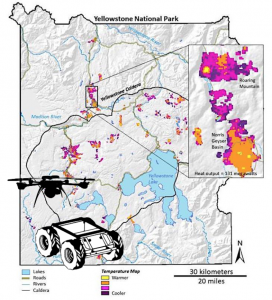
Tom first loads an existing map that includes all the geometry information indicating where the obstacles are. He then specifies the region he wants to track the temperatures on the map, as shown in figure 1, the region of interest is bounded with a red bounding box. SAMP automatically deploys one UGV and one UAV to execute the temperature modeling task.
SAMP system divides the area of interest into UGV’s area and UAV’s area based on the geometry information and robots’ capabilities. The modeling system then initializes a distribution map and generates two initial sampling locations for UGV and UAV to collect temperature samples respectively.
After receiving initial target location, UGV and UAV start to automatically navigate to the target location without hitting obstacles. After reaching the target locations, robots take temperature measurements and send back to the master computer modeling system. modeling system reads the samples and uses them to update the temperature model. Based on the updated model, the system then selects the most informative positions as the new target locations and assign to UAV and UGV respectively. UAV and UGV then go to the next target locations to take samples and further update the model.
This online sampling process is conducted iteratively until the temperature model converges. During the sampling, if the UGV meets an unreachable area like hot spring or cliff, the system remarks that location as an interest point for the UAV. In addition, if a robot fails to navigate to the assigned target location within the time limit, a new target position will be sent to the robot. If the robot gets stuck during the navigation, a recovery behavior will first conduct, but if it does not help, then the new target location will be sent. If the robot fails to move to the new target location, then returning to starting point command will be executed. If the robot fails to move back to the starting point, Tom needs to retrieve the stuck robot manually based on the localization information.
After successfully finishing the sampling task, UAV and UGV will navigate back to the starting point, and the modeling system output the final distribution model that can be used for Tom’s thermal activity study.
